DIY — Dronez
W końcu drony, co? I to informacje na temat takich, które można (nawet trzeba) sobie samemu skonstruować. Pewnie jak poszukacie w sieci to znajdziecie z milion osób, które już to zrobiły i mają jakieś doświadczenia, które są inne niż moje. Ale moje, dla mnie, podziałały skutecznie i dzięki temu mam fajną zabawkę. Zabawa nie jest tania, ale właściwie, żeby zbudować coś co lata i ma kilka kg ciągu wcale nie trzeba szczególnie wielkich pieniędzy. Czasem okazuje się, że sam sprzęt latający wychodzi niewiele drożej niż aparatura do jego sterowania. W każdym razie, własną broną da się polatać za około 4 stówki, choć równie dobrze może to być i 40k, kwestia sprzętu. Ten ciąg literek jest o komponentach i doborze, a jeśli okaże się, że temat interesujący to kolejny będzie jak to dokładnie poskładać (albo coś z większymi szczegółami?). Ach i mogłem czegoś nie dopowiedzieć, albo po prostu zapomnieć o czymś wspomnieć.

Teoria
Latać pionowzlotem da się nawet na jednym silniku, ale to się nazywa śmigłowiec, i tym się nie zajmujemy. W wypadku większej ilości napędów, liczba silników może być nieparzysta lub parzysta. W pierwszym wypadku jedna grupa silników musi mieć serwo, które steruje ich kątem pochylenia (aby zrównoważyć moment obrotowy), oraz często zamontowane większe śmigła niż reszta. Kiedy liczba napędów jest parzysta, po dodaniu wszystkich momentów obrotowych wychodzi zero, i przynajmniej w teorii, model sam z siebie nie pragnie się obracać w żadną stronę. Interesuje nas najprostszy wariant, czyli ostatni. Z jednym wyjątkiem, kiedy mamy dwa silniki, co prawda same równoważą swój moment obrotowy, ale potrzebujemy jeszcze serw do sterowania ich kątem pochylenia. No chyba, że interesuje nas tylko lot w jednej osi, ewentualnie z wiatrem... Ta konkretna konfiguracja w realnym świecie nazywa się V‑22 Osprey, i jest jedną z moich ulubionych konstrukcji latających. Niestety, też się nią nie zajmiemy.
W przykładzie zajmiemy się konfiguracją X, bo jest chyba najprostsza. Ma swoje wady, ale póki nie latamy sprzętem za kilka tysięcy, możemy te wady zignorować. Główną wadą konfiguracji z czterema silnikami jest to, że jak nam odkręci się śmigło, albo odpadnie, albo się złamie, generalnie - któryś z napędów ulegnie awarii, wiropłat stanie się całkowicie niekontrolowalny, spadnie jak kamień. Jeśli silników mamy sześć, istnieje opcja, że da się tym nawet jako tako wylądować. W wypadku ośmiu, da się spokojnie latać. Tyle, że osiem silników, to koszt, cóż, czterech dodatkowych silników (w stosunku do konfiguracji X), inna (droższa i większa) rama, dodatkowa waga, etc. Jak to w życiu bywa, coś za coś.
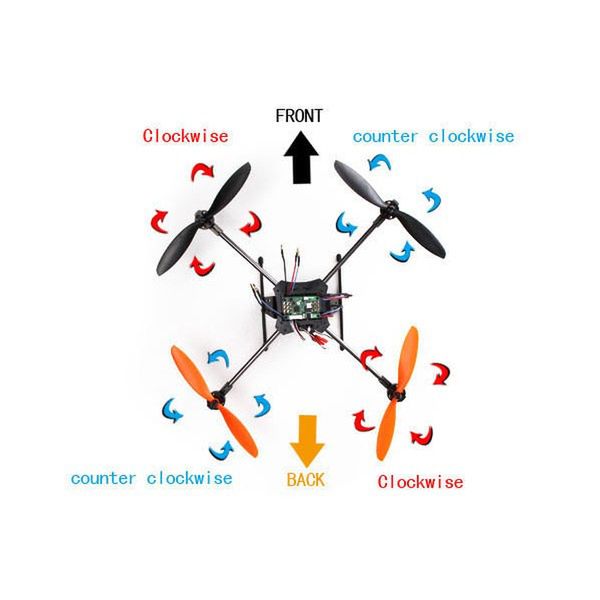
Jak się tym steruje? Jeśli wszystko jest idealnie, to mamy 4 identyczne kontrolery, silniki i śmigła. Jedna para silników obraca śmigłami w prawo, druga w lewo. Kiedy zwiększamy moc wszystkich silników, model leci w górę, jak zmniejszamy - w dół. Obrót wykonuje się redukując moc pary obracających się w jedną stronę śmigieł, jednocześnie zwiększając moc drugiej. Przechył przód/tył/na boki - odpowiednio podnosząc moc przedniej/tylnej/bocznej pary.

Sterowanie jest generalnie proste, bo całością steruje pokładowy komputer. Teoretycznie mogłoby dać się sterować silnikami bezpośrednio, ale jeszcze nie widziałem, aby komuś ta sztuka wyszła. Pewnie przez to, że ani silniki ani śmigła nie są idealnie identyczne, ale ćśśś.
Rama
Rama jest elementem (co za zaskoczenie), na którym zamontowane jest wszystko poza aparatura nadawczą. Więc im więcej w niej miejsc do zamontowania stuffu, tym lepiej. To, jaką wybierzesz ramę określa konfigurację urządzenia latającego, (czyli to ile silników będzie potrzebnych i w jakim będą układzie).
Nasza podstawa ma parę parametrów, z ważniejszych - jeden oczywisty - rozstaw silników, jeden mniej oczywisty, którego i tak nie ma w specyfikacji - sztywność. Pierwszy, co oczywiste, określa nam jak daleko (po przekątnej) są od siebie silniki. Ważne o tyle, że to określa maksymalny rozmiar śmigieł, jakie można zainstalować (im większe tym lepiej, ale do pewnego momentu). A sztywność? Napęd wibruje, wibruje bardziej bardzo lub mniej bardzo. Im mniej sztywna jest rama, tym te wibracje bardziej przenoszą się na elektronikę zamontowaną w środku. W tej elektronice jest żyroskop i akcelerometr. Oba nie lubią wibracji, znaczy - raczej się nie uszkodzą, ale software, który odczytuje z nich informacje, tylko do pewnego stopnia jest w stanie określić czy te wibracje to wibracje. Po przekroczeniu pewnej granicy zacznie odbierać te wibracje jako nagłe zmiany kierunku lotu, co spowoduje, ze będzie chciał je korygować. Przez niezbyt sztywna ramę, lot naszym modelem może przypominać niekontrolowane drgawki.
Najtańszą opcją są niby klony ram DJI F540, unikać. Znaczy, to co DJI zrobiło działa, ale Chińczycy używają nieco innego plastiku (nie zawsze, ale nie ma jak sprawdzić z czego to jest zrobione póki do nas nie dotrze), przez co całość lubi drżeć. Jeśli koniecznie chcecie tego typu ramę, weźcie coś droższego/oryginalnego. Ale ja bym unikał konstrukcji plastikowych. Lepszą opcją, IMO, jest rama zrobiona z aluminium + włókno szklane. Najlepszą opcją są konstrukcje z włókien węglowych, są tez najdroższe. /meh upolował ramę z rodzaju X525, nie narzekam. Poza tym, lepiej to wygląda niż te plastikowe F450 i podobne. Wady - podwozie nie umożliwia instalacji praktycznie niczego poza baterią. Z zalet, jest składana, sztywna.

Napęd
Szczęśliwie (lub nie), napęd w tych cudach jest prosty jak budowa cepa. Silniki są na sztywno przymocowane do ramy, do wału silnika doczepione jest śmigło. Prościej się chyba nie da.
Da się latać na kilku rodzajach silników, ale nas interesują BLDC (bezszczotkowe na prąd stały), najbardziej popularne i chyba najmniej problematyczne. Występują w mnogości konfiguracji i producentów. Jak wszystko, posiadają parametry, te na które należy zwrócić uwagę: maksymalny prąd ciągły, maksymalny prąd chwilowy, KV (liczba obrotów na V). Kierując się parametrami prądowymi, trzeba sobie dobrać kontroler (o tym niżej). Każdy silnik ma określony zalecany przedział rozmiarów śmigła, w zależności od tego, do pracy z jakim rodzajem akumulatora będzie wykorzystany. Generalnie zasada jest taka, że wybieramy największy zalecany rozmiar jaki się tylko da, i jaki wciśnie się nam w ramę, przy danym akumulatorze. Śmigła i silniki powinny być identyczne (no prawie, dwa śmigła prawe i dwa lewe, ale jednego typu).
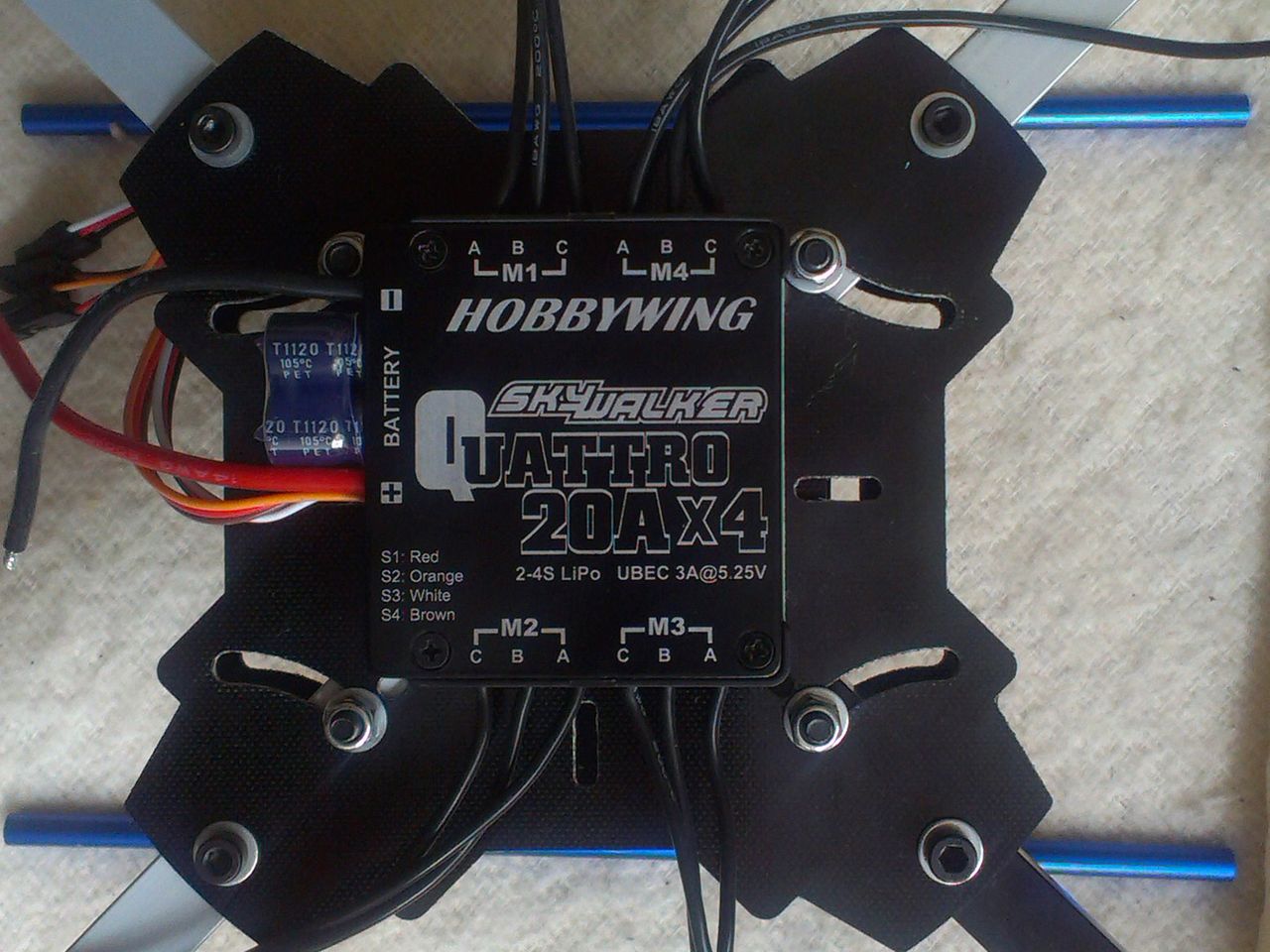
Moja zabawka ma cztery silniki Aeolian 2326 KV1200, jeden kontroler Hobbywing 4x20A i plastikowe śmigła Gemfan 9x4,7. Pierwszy parametr śmigła to jego średnica w calach, drugi - nachylenie. Wszystko zasilane przez 5Ah akumulator 3S.
Właśnie, śmigła - najczęściej spotykane w 2 wariantach, plastikowe lub z włókien węglowych. Plastikowe są bardzo łatwe w wyważaniu, i tanie. Niby ciężkie, ale oj tam. Węglowe są super, tyle, że te tanie czasem łamią się podczas lotu i ciężko je wyważyć (pękają). Teoretycznie śmigła powinny być wyważone fabrycznie... znaczy jak się je wsadzi w to:

I ustawi pod dowolnym kątem, to śmigło nie powinno się ruszać. Praktycznie, tak dobrze nie ma i wyważenia trzeba dokonać samemu. Dlaczego to ważne? Wibracje. W moim wypadku wyważenia dokonuje obcinając po kawałku jednego (cięższego) końca śmigła, póki zaprzestanie procederu ruszania się. Kiedyś doklejałem kawałki taśmy, jak w niektórych poradnikach radzą, ale bleh.
Śmigła *muszą* być dobrane do silników (i napięcia aku). Im większe śmigła tym większy ciąg, zależy głownie od promienia. Im większy ciąg, tym mniej obrotów potrzeba dla identycznej wagi modelu, by mógł latać. Tyle, że wraz ze zwiększaniem jego rozmiaru rośnie potrzebny prąd. Najoptymalniejsza energetycznie konfiguracją są wielkie śmigła poruszające się z względnie niską prędkością obrotową. Duże śmigła, niskie KV. Ale jak zwykle, są haczyki, duże śmigło - niższe obroty, ale trudniej nim kręcić. Źle dobrana konfiguracja najpewniej skończy się przegrzaniem silników, w konsekwencji spaleniem uzwojeń. Gdzieś w okolicy pewnie spali się też kontroler silników, a jak dobrze pójdzie to i bateria do niczego się nie nada. Szczęśliwie dla nas, producenci silników podają dla każdego rodzaju z jakimi typami śmigieł powinien pracować, przy jakim napięciu zasilania, a znając to - dobranie kontrolera jest banalne.
Regulatory aka ESC - coś bez czego nie ma opcji aby silniki BLDC chciały się obracać. ESC jest z jednej strony podłączony do silnika trzema przewodami (+ czasem czujnik halla, ale tej wersji nie analizujemy). Nie ma znaczenia które przewody kontrolera do których przewodów silników podłączymy. Znaczy ma, bo jak podłączymy źle to silnik będzie się obracał w przeciwną stronę, ale to nie problem bo wtedy po prostu zamieniamy dwa z nich i po kłopocie. Z drugiej strony regulator musi być podłączony do baterii, tu jak źle podłączymy kabelki to się stanie coś złego, ale nawet daltoniści rozróżniają czarny od czerwonego. Bardzo dużo kontrolerów ma coś co się zwie BEC lub UBEC, to jest wbudowany w kontroler zasilacz dla całej elektroniki. BEC jest liniowy, UBEC impulsowy. Drugi jest sprawniejszy energetycznie, ale przy prądach jakie ciągnie kontroler aż tak dużego znaczenia to nie ma. W wypadku kiedy mamy cztery regulatory z BECem, *tylko jeden z nich* powinien być podłączony do elektroniki. Jest to o tyle problematyczne, że (U)BEC w większości wypadków ma wyprowadzone zasilanie razem z wejściem sygnału sterowania. Wypada wtedy wypiąć z tych wtyczek pin + i go zaizolować. Regulator dobieramy do kombinacji śmigło/silnik/akumulator. Powinien mieć minimum 10% naddatku w parametrze prądu jaki potrafi podać. Są na rynku kontrolery w wersji poczwórnej (taki mam), jeśli taki zastosujecie możecie kompletnie pominąć "power distribution board".
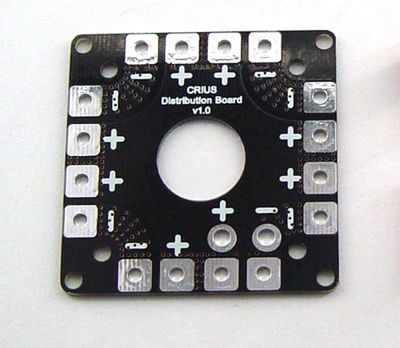
Power distribution board - coś do czego podłączony jest akumulator i co rozdziela zasilanie na silniki, czasem (U)BEC, i resztę elektroniki.
Moja konfiguracja zapewnia około 5,64kg ciągu, przy 2kg masy. To przekłada się na ~14minut latania (z kamerą). Dało by się lepiej, jakbym wybrał silniki z mniejszym KV i większe śmigła. Ale to sobie zostawiłem na wersję v2, która będzie albo Hexa- (sześć silników) albo Octo-copterem (osiem).
Czas lotu i akumulatory
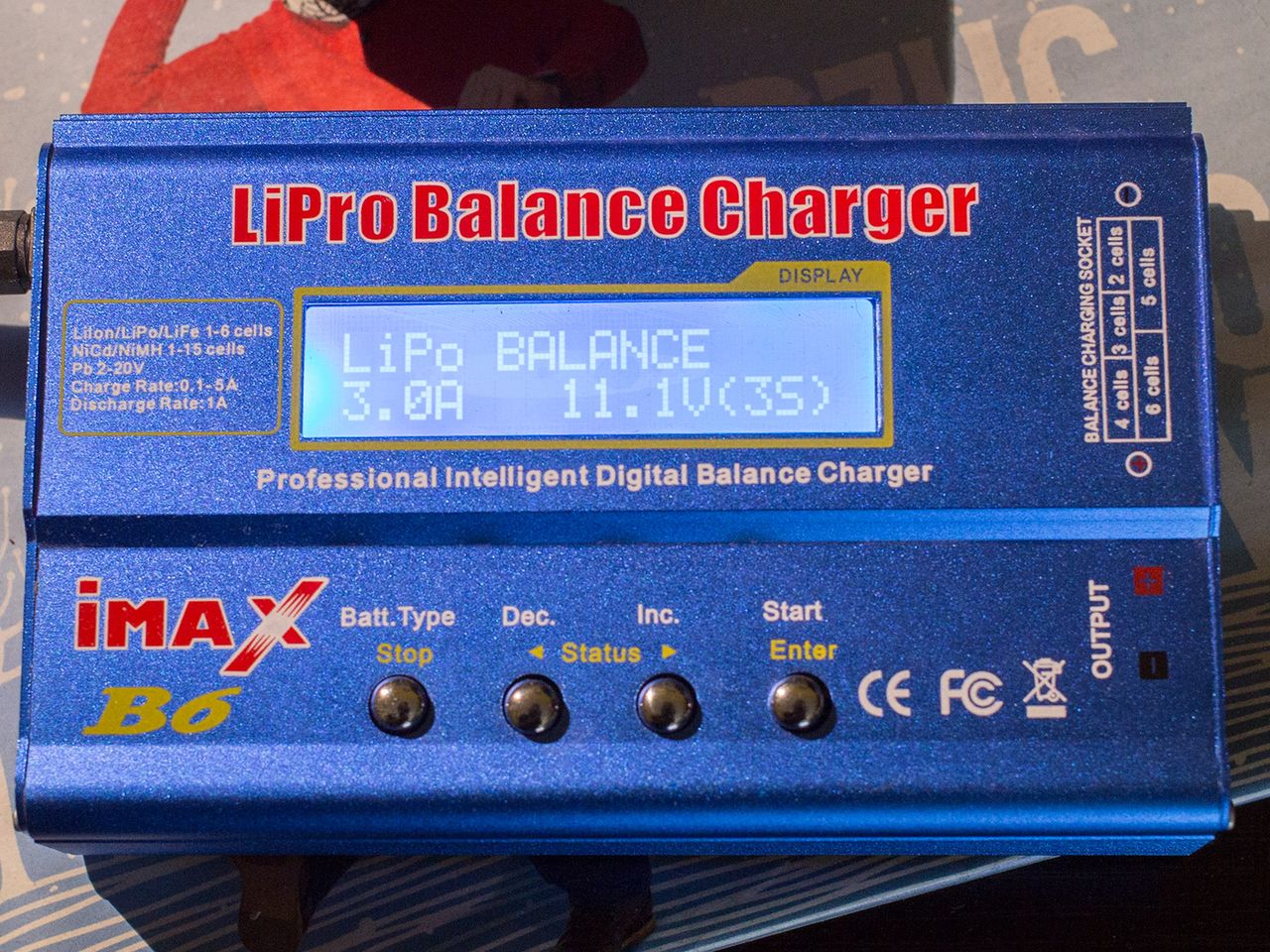
Wbrew temu co dało się słyszeć na HZ, da się latać na jednym tankowaniu więcej niż ~10 minut (da się i godzinę, droga opcja). Drogi są dwie, wszystkie idą w duże śmigła, niskie KV i "shitload of batteries" (dlatego drogo). Różnica tkwi w typach akumulatorów. Akumulatory (także modelarskie) składają się z cel, ogniw. Ogniwa, na ogół LiPo, mają napięcie 3,7V nominalnie. Konfiguracja z jednym ogniwem zwie się 1S, jeśli ogniwa są dwa, 2S, trzy - 3S. Im więcej ogniw tym większe napięcie, 3S w sumie 3 x 3,7V = 11,1V. Teoretycznie lepiej mieć wysoko-napięciowy układ napędu z niskim prądem - niższe straty. Tak przesyła się prąd z elektrowni, jakbyśmy mieli układ z wysokim prądem i niskim napięciem, elektrownie musiały by stać w centrach miast, takie straty. Praktycznie możemy mieć niskonapięciowy układ z dużym prądem i też polatać długo. "Ale, ale, jak to?". Fizyka sobie, życie sobie? Nie zupełnie. Jeśli chcemy mieć całkowita pojemność 5Ah, możemy użyć jednego ogniwa takiej pojemności. Jeśli potrzebujemy większego napięcia, potrzebujmy 2 lub więcej ogniw takiej pojemności. Widać gdzie to zmierza? Dodawanie ogniw do akumulatorów podnosi ich napięcie (i efektywność), ale i masę całego układu. Potrzeba przez to więcej mocy. Układ niskonapięciowy ma większe straty, ale i mniej kg do podniesienia. Wszystko, jak to w życiu, zawiera się w słowie "równowaga". Akumulatory poza napięciem maja jeszcze dwa parametry, o których powinniśmy wiedzieć: maksymalny prąd rozładowania i ładowania, oba wyrażone w C. Czyli krotności ich pojemności. Jeśli aku ma dopuszczalny prąd rozładowania 10C i 5Ah pojemności, można z niego wydobyć 50A prądu. Jeśli ma dopuszczalny prąd ładowania 1C (na ogół), ładowanie potrwa około godziny. Aku są większości "głupie", nie to co w laptopach - nie mają elektroniki zabezpieczającej. Odpowiednia ładowarka to podstawa (tutaj IMAX B6).
Ładować można w 2 trybach, po prostu ładowania lub ładowania z balanserem. *Nigdy* nie należy przekraczać dopuszczalnego prądu ładowania i o ile się da, a lepiej żeby się dało - używać balansera:
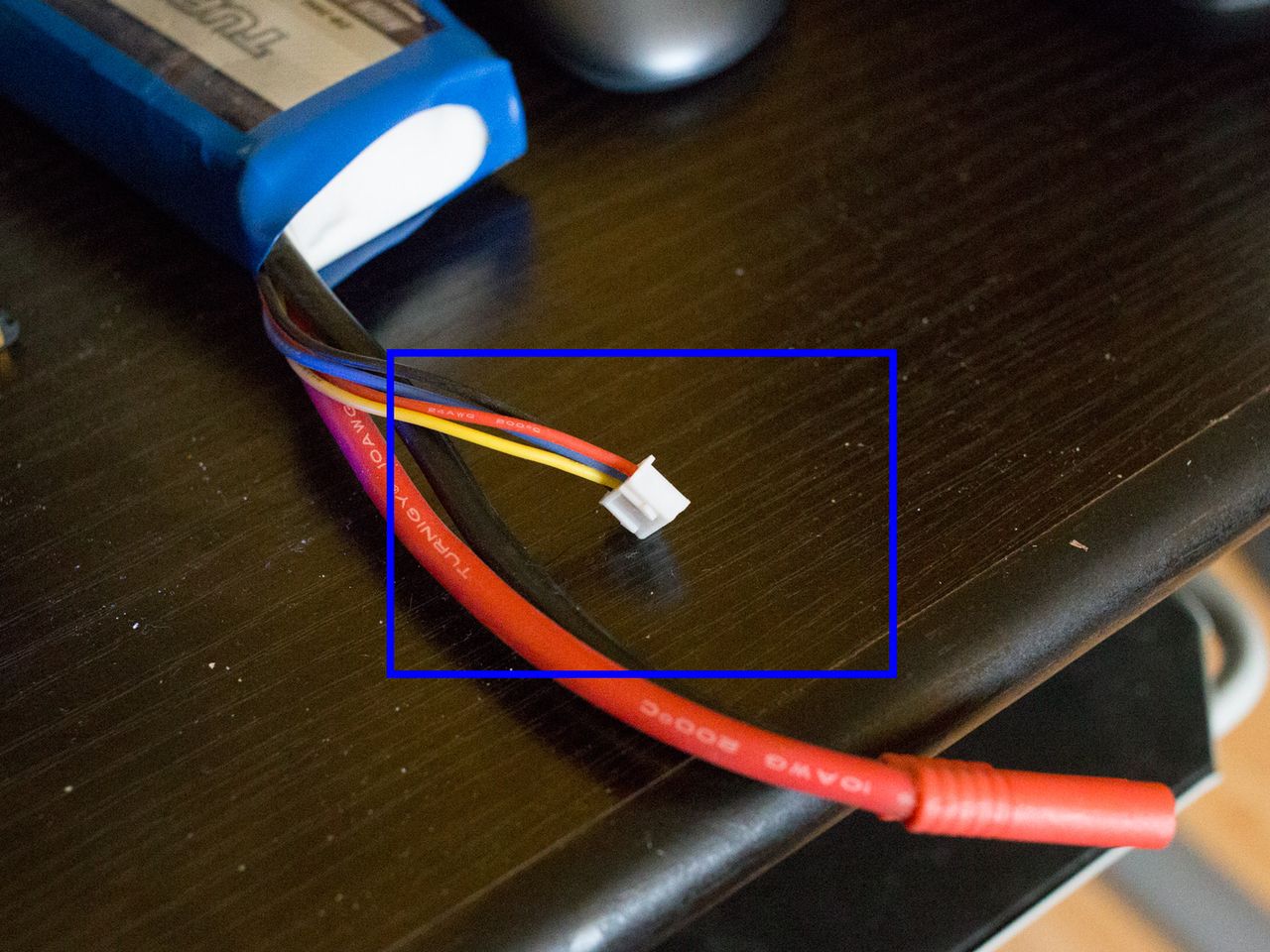
Ta mała wtyczka umożliwia ładowarce monitorowanie stanu poszczególnych cel. Ważne to jest w 2 sytuacjach, ale sprowadzają się do do jednego: każda cela powinna mieć takie samo napięcie jak reszta. Jeśli w trakcie rozładowania/ładowania będą znacznie od siebie odbiegały, dojdzie do nieodwracalnego obniżenia pojemności. Bo:
- W wypadku ładowania, napięcie na każdej celi LiPo nie powinno przekroczyć 4,2V. Jeśli dwie cele będą słabe (powiedzmy 3,7V), a jedna mocna (4,2V) - 11,6V. Ładowanie powinno się zakończyć gdy aku 3S osiągnie 12,6V. Tylko, że w momencie jak dotrze do 12,6V to dwa słabe ogniwa będą miały ledwie 4V, a ta mocniejsza dotrze do 4,6V. Dwie nie w pełni naładowane, jedna przeładowana, przez co straciła nieodwracalnie na pojemności.
- W wypadku rozładowania, mocniejsze cele zaczną w którymś momencie ładować słabsze, z odwrotną polaryzacją - jeden z efektów, który potem ludzie (niesłusznie) określają jako efekt pamięci.
Kiedy w użyciu jest balanser, układ ładowania (co może sugerować nazwa), będzie usiłował zbalansować wszystkie cele akumulatora aby osiągnęły finalnie identyczne napięcia. Dlatego lepiej poczekać trochę dłużej na naładowanie aku używając balansera, niż wydawać szybciej fundusze na nowe źródło energii. Poza tym, jeśli chcesz aby akumulator służył ci długo, nie katuj go. Jeśli napęd potrzebuje w szczycie 100A, dobierz akumulator mogący dostarczyć 150A. I nie rozładowuj ogniw poniżej ~3V3, krzywa rozładowania dla LiPo wygląda mniej więcej tak:
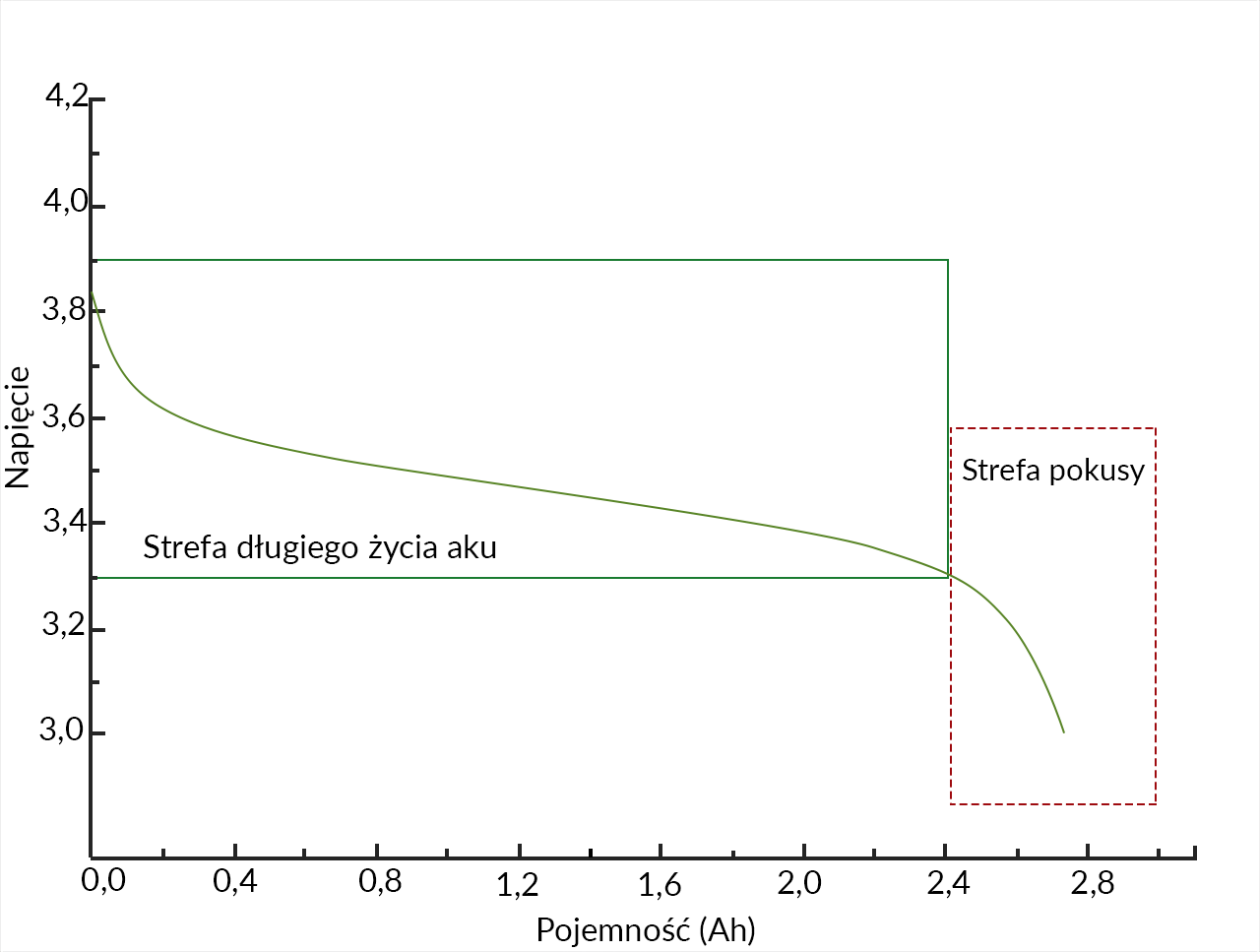
I tak nie ma tam już wiele energii, a rozładowanie dużym prądem poniżej 3V3 (na ogniwo) zaczyna generować duże ilości ciepła, temperatura to kolejna rzecz, której LiPo nie lubią. Jeśli kontroler ma taką opcję, ustaw odcięcie na soft+high. Soft, bo jak się zagapisz i będziesz jeszcze latał przy końcu zasilania, to kontrolery nie odetną po prostu zasilania, tylko będą stopniowo zmniejszać moc silników, a high - bo to na ogół właśnie poziom około 3V3/celę. Uwaga: Napięcie nieobciążonego ogniwa jest wyższe niż pod obciążeniem.
Komputer
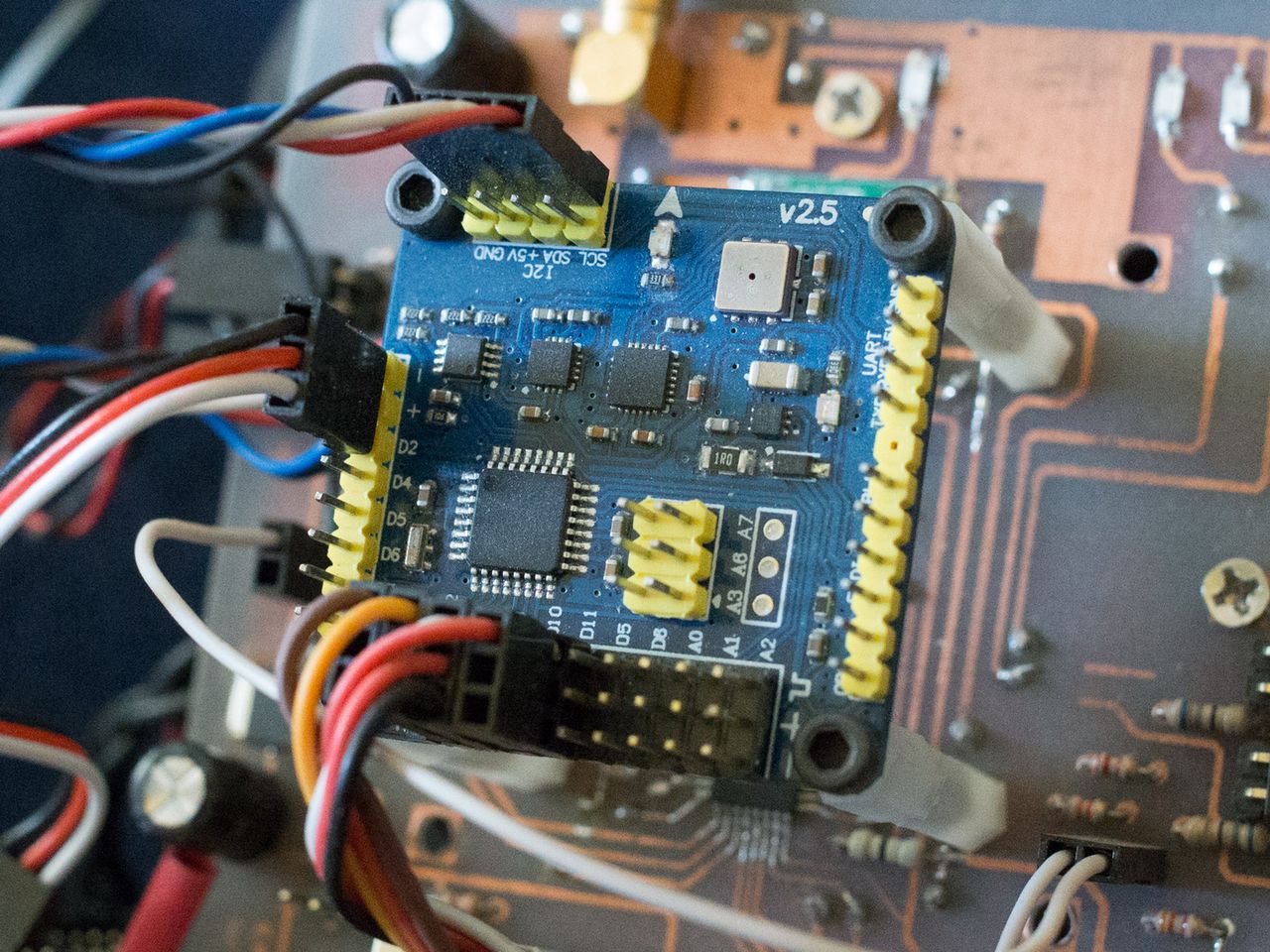
Dużo tego jest, jak się człowiek uprze i na kontrolerze z Wii polata. Ale tak z sensem to mogę polecić albo Crius v2:
Albo Flip32+:
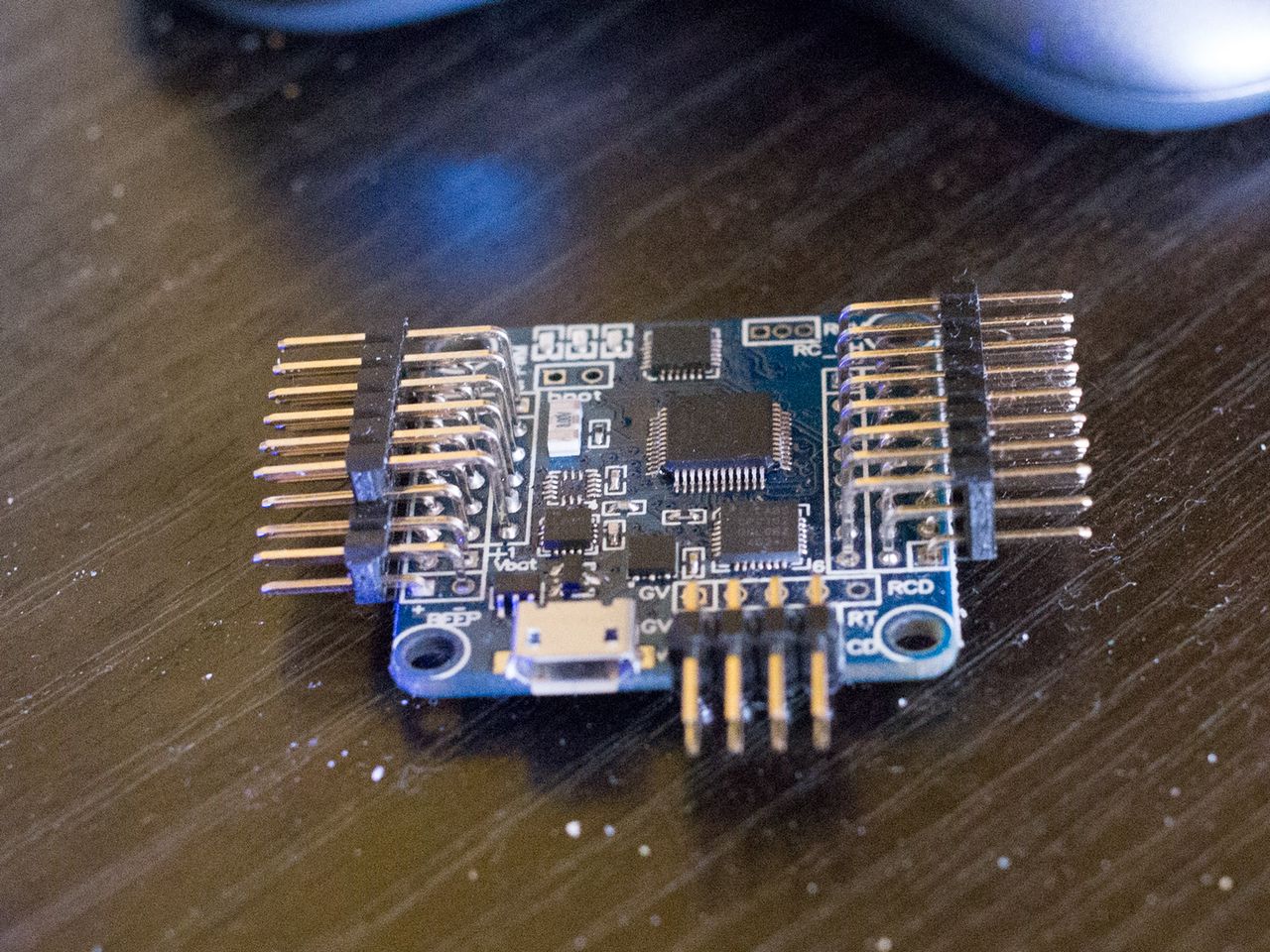
Crius jest zbudowany na ATmega328p (8bit) i udaje Arduino (którego nie trawię). Wbudowany akcelerometr z żyroskopem, barometr i magnetometr. Pierwsze dwa używane do stabilizacji lotu, barometr do utrzymywania wysokości, ale na tym konkretnym to bym nie polegał. Magnetometr przydaje do ułatwienia sobie życia przy sterowaniu (do omówienia przy okazji trybów lotu). Drugi ma lepszy barometr (na tym bym polegał), ale przede wszystkim inny CPU - 32bitowy rdzeń ARM, a przy okazji więcej pamięci RAM i FLASH, można na niego władować bardziej zaawansowany soft. Poza tym są podobne, działają nawet na podobnym sofcie. Przyjmują sygnały sterujące w postaci PWM/PPM/SBus, sterują silnikami w maks liczbie 8, obsługują gimbal, GPS, i kilka innych rzeczy. Soft na Flipa jest bardziej zaawansowany z okazji lepszego CPU.
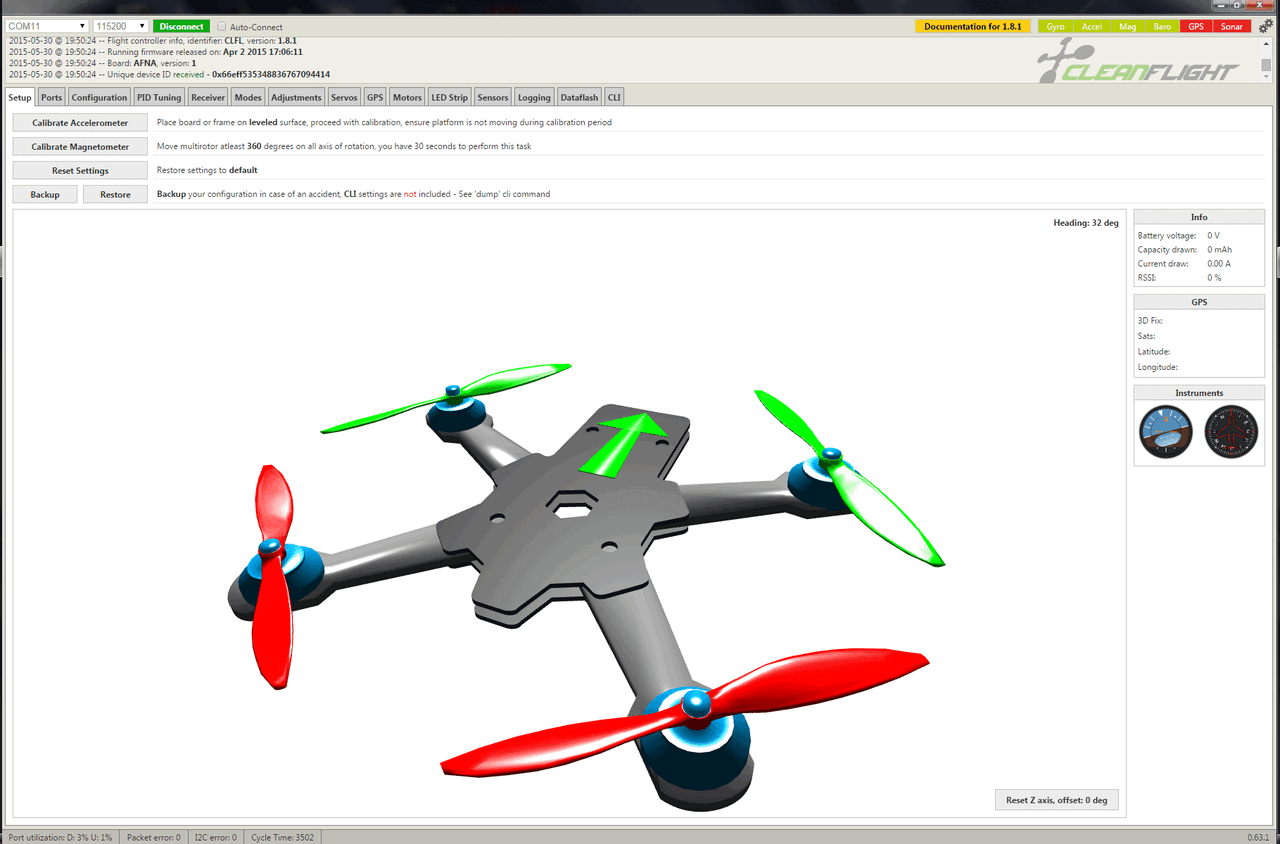
A jeśli zależy wam na nawigacji inercyjnej, to chyba głównie kontrolery DJI z serii Naza, czego też nie przerobimy, ale może wyjaśnię o co chodzi. MultiWii/BaseFlight/CleanFlight i takie tam nie potrafią łączyć informacji z różnych czujników w jednym modelu zachowania statku powietrznego. Oznacza to mniej więcej tyle, że jak ma barometr - może utrzymać wysokość. Efekt jest tego taki, że jeśli chcecie aby trzymał pozycję to póki nic na niego nie wpływa, będzie jako tako trzymał pozycję. Jak powieje - poleci zgodnie z wiatrem, kontroler nie jest w stanie określić że pojazd się przemieszcza sam z siebie, pod wpływem zewnętrznej siły. Kontroler jest zainteresowany głównie tym pod jakim jest kątem i jak szybko go zmienia, jeśli coś wpływa na latadełko nie zmieniając kąta tegoż - będzie dryfował. Naza z takimi problemami sobie radzi, jeśli ma trzymać pozycję, takąż będzie trzymał, na samym żyroskopie i akcelerometrze. MW do trzymania pozycji potrzebuje GPSu i barometru. Ale ludzie od ClieanFlight pracują nad "sensor fusion".
Software
Chyba najważniejsza rzecz. Jeśli wybierzecie Criusa, najlepszym wyborem będzie chyba MultiWii. Jeśli Flpa, to CleanFlight. Historia wygląda mniej więcej tak: Było sobie MultiWii, ale działało na 8bit procesorach, jeden człowiek, który poza tym, że jest koderem to jeszcze elektronikiem stworzył Naze32 (jego klonem jest Flip32) i zrobił 32bit forka MultiWii na tę platformę, zwie się to BaseFlight. Ale, że timecop, zdaje się, nie jest najlepszym zarządcą, czy coś, ludzie od BF się pokłócili, i w efekcie powstał CleanFlight. CF jest, IMO, lepszy niż oryginał, choćby z jednego prostego powodu: ma automatyczna kalibrację PIDów (rzecz na osobny art). Co prawda trochę niebezpieczną w obecnym stadium, ale konfiguracja PID dla mnie osobiście była udręką. Planują aktualnie zastąpić autotune przez g‑tune, które samo się konfiguruje podczas normalnego lotu, także, wygodna rzecz. Jedyne, co mnie w BF/CF drażni, to to, że ichnia aplikacja konfiguracyjna działa jako aplikacja dla Chrome. Poza tym aby zmienić algorytm kontrolny w wypadku MW trzeba przekompilować soft i wgrać go do kontrolera, gdzie w wypadku BF/CF to tylko kwestia zmiany parametru. Tak generalnie jest z większością zaawansowanych ustawień, MW - ponowna kompilacja i upload, CF - zmiana parametrów.
Aparatura i odbiornik
Bardzo ważna rzecz, jeśli będzie kiepska, to może zdarzyć się, że sobie radośnie latamy aż tu nagle nasze dzieło decyduje się odlecieć w nieznanym kierunku. Z pomocą przychodzą jednak Chińczycy i elektronika. Jeśli nie planujesz wydać masy kasy na aparaturę weź FlySky FS‑TH9X.

Chińska zabawka, ale na tyle dobra, że bardziej renomowane firmy jak Turnigy mają ten model brandowany pod swoją marką. Yup. Działa na 2,4GHz, odbiornik podaje co prawda sygnał PWM, ale da się go zhaczyć aby podawał PPM. Poza tym protokół komunikacji jest rozpracowany, można tworzyć własne zabawki używające tej aparatury. Jedyną (poważną) wadą tej aparatury jest jednak software. Bardziej paskudnego softu w życiu nie widziałem. Ale, że to działa na ATmega64 - istnieją przynajmniej trzy alternatywe wersje softu, który jest w porządku. OpenTX, er9x, th9x. Osobiście mam OpenTX, gdyż nie wymaga modowania pozycji przełączników. Niestety aby zmienić soft trzeba ręcznie dolutować kilka przewodów (ale zdaje się, któraś wersja Turnigy ma firmowo zainstalowane złącze ISP). Znaczy, nie trzeba, bo raz że istnieją specjalne płytki, które wystarczy wsadzić do obudowy w odpowiednim miejscu, i z nich wyprowadzone jest złącze programowania, ale zrobienie tego ręcznie jest najprostsze. Poza tym istnieją mody dodające podświetlenie wyświetlacza i obsługę telemetrii. Alternatywny soft dodaje całą masę rzeczy, począwszy od lepszej konfiguracji, po rozszerzenie ilości nadawanych kanałów do 16 (i ich pełnej konfiguracji). Generalnie zasada jest taka - jeden kanał = jedna oś/potencjometr lub jeden przełącznik. Im więcej masz kanałów, tym więcej rzeczy możesz zmieniać z aparatury podczas lotu. Minus jest taki, że odbiornik ma tylko osiem wyjść kanałowych, ale są mody. W wypadku tej konkretnej aparatury, unikać wersji "native 2,4GHz", ma niewymienne moduły nadawczo/odbiorcze, a ich wymiana może być bardzo ciekawą opcją.
Do sterowania latadłem potrzeba minimum czterech kanałów:
- przepustnica
- obrót
- przód/tył
- lewo/prawo
Dobrze jest mieć odcięcie przepustnicy na jednym kanale. Reszta to kwestia gustu i potrzeby, można mieć bezpośrednie sterowanie gimbalem, albo zmieniać tryby lotu (też do opisania).
Jak już się wszystko połączy razem, to drugi lot wygląda tak (nudny film o początkach latania):
I można się bawić w zdjęcia:

Nic szczególnie odjechanego, ale to początki, a do tego zrobione Mobiusem. Ale spokojnie, z każdym lotem jest coraz lepiej.
Podsumowując moją konfigurację:
- Rama: X525
- Silniki: 2826 KV1200
- Śmigła: Gemfan 9x4,7
- Aku: Turningy 5Ah, 20-30C
- Kontroler: Flip32+
- Odbiornik: FS-R9B zmodowany tak aby podawał sygnał PPMsum
- Nadajnik: FlySky TH-9X
- Do tego customowy nadajnik i odbiornik telemetrii, Mobius do zabaw w zdjecia/filmy
Lata około 12‑15 minut. Ale dobierałem komponenty nieomal strzelając na ślepo. :D Dostanie jeszcze pewnie gimbal i cięższy aparat, przez co skróci się czas lotu, ale zdjęcia będą lepsze.
Przy okazji kolejna notka: nie montować kamer na gąbce, kamery mają często rolling-shutter, a jak się je jeszcze wpakuje na gąbce to zapis z kamery wygląda źle. Lepiej wychodzi po prostu zamocowanie na sztywno. True story, *przed* wyważeniem silników i śmigieł, kamera zamontowana zipem do ramy nie dawała efektu "pływania", po wyważeniu (wibracje spadły), zamontowana na gąbce - jak widać na filmie.