

[DIY] Gimli — terenowy robot inspekcyjny #2
W pierwszej części wpisu o Gimlim zaprezentowałem pomysł oraz wykonanie obudowy , dla następcy SPiBot-a. W tej części opiszę już złożenie pozostałych elementów nadwozia, przełożenia napędu i kilka innych rzeczy. Ten etap pracy zajął mi sporo czasu ze względu na kilka problemów z uchwytami osi oraz to, że wymagało sporo pracy manualnej, ale wszystko udało na szczęście złożyć.

Przełożenie napędu
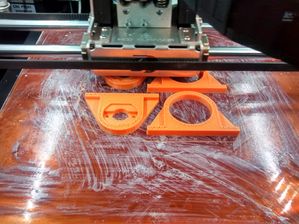
Aby zamontować ośki na które będą zakładane koła oraz łańcuchy musiałem przygotować sposób na montaż tych osiek w obudowie. Potrzebne do tego były łożyska kulkowe o wewnętrznym otworze 10mm, pręt gwintowany 10mm. Uchwyty na łożyska przygotował mi znany wam już mój kolega Michał (który pomagał mi przy innych opisywanych tu projektach) w formacie plików stl do wydruku na drukarce 3D.

[join][img=uchwyt2][join][img=uchwyt3]

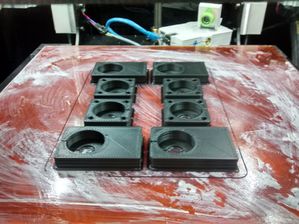
Łożyska oraz pręt gwintowany zakupiłem w sklepie metalowym. Łożyska są zaciskane nakrętkami z obu stron, natomiast same łożyska włożone do wydrukowanych uchwytów i przykręcone do obudowy robota. Pręt gwintowany został pocięty na odcinki. Łożyska zostały zamontowane do obudowy robota.




[join][img=monloz2][join][img=monloz3][join][img=monloz4][join][img=monloz5][join][img=monloz6][join][img=monloz7]
Montaż kół
W celu zamontowania kół użyłem redukcji z 10mm na 8mm które używa się głownie do montażu lusterek w motorach. Redukcje pasują idealnie na tylną część koła. Musiałem tylko poszerzyć otwór do 8mm.



[join][img=montazkol(2)][join][img=montazkol(1)][join][img=kolamonaz(1)][join][img=kolamonaz(1)]

Redukcja okazała się nie do końca takiej jakiej szukałem bo z tyłu ma gwint M10 lecz z rozstawem 1.25mm a nie jak standardowo w prętach i śrubach gwintowanych 1.5mm. Ale nie było większych problemów kupić pręt M10x1.25mm jak również nakrętki.
Na pręt zostały przykręcone koła zębate , które wcześniej u szwagra przyspawaliśmy do nakrętek.


[join][img=zebatkisp2][join][img=zebatkisp3]

Całość została skręcona nakrętkami i skontrowana.


[join][img=zlozone3][join][img=zlozone4][join][img=zlozone5][join][img=zlozone6]
Silniki
Obydwa silniki musiałem zamontować do obudowy. Szybki przegląd jednego z portali z gotowymi projektami do wydruku i znalazłem uchwyt na silniki z wkrętarki (jak tu nie kochać społeczności ;)).

[join][img=uchwytysilnikow3][join][img=uchwytysilnikow4][join][img=uchwytysilnikow5][join][img=uchwytysilnikow6]
Do silników zamontowywałem zębatki dla łańcucha 3/8 cala.


Niestety w sterowniku silników (o którym pisałem w pierwszej części) przy drugich testach spaliła się ścieżka na płytce PCB. Doszedłem do wniosku, że lepiej poszukać coś innego. Szybki przegląd dostępnych sterowników i wybór padł na układ VNH2SP30, który da radę wyciągnąć 14A (i 30A przy krótkich skokach) co w porównaniu do moich wcześniejszych 10A daje duży skok nie tylko możliwościami ale i cena takiego sterownika wychodzi około 12$ za moduł dwukanałowy.
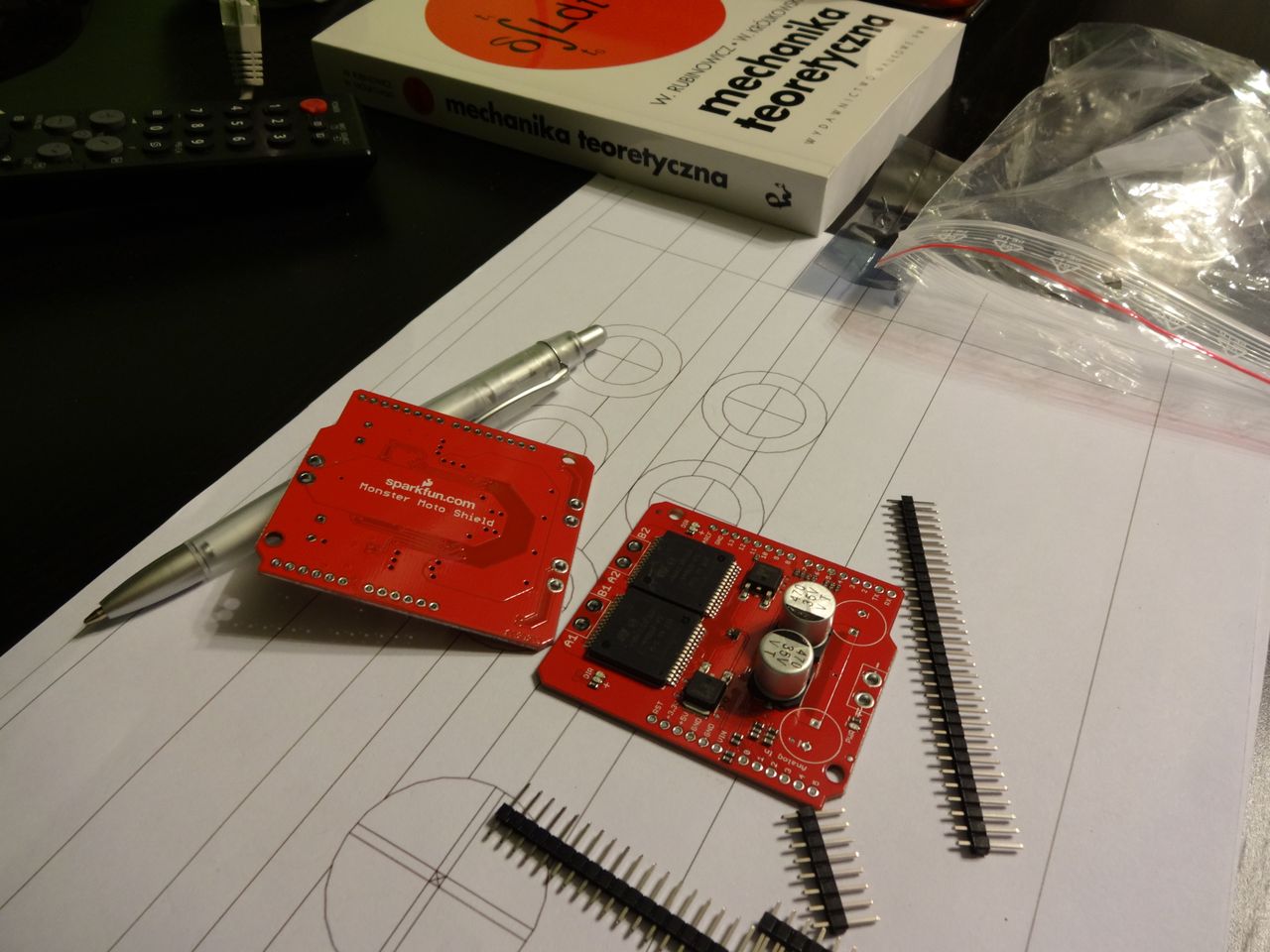

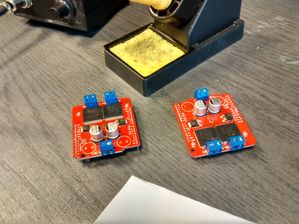
Oczywiście zamówiłem 2 takie sterowniki aby mieć jeden w zapasie. Sam moduł sterownika dedykowany jest pod Arduino i można go użyć jako zwykły Shield (rozkład pinów jak pod UNO).
Przełożenie z silników na koło jest przenoszone przez łańcuchy. Z silnika idzie jeden łańcuch na jedną oś, zaś na tej osi jest kolejna zębatka, która przenosi przełożenie na drugą oś.
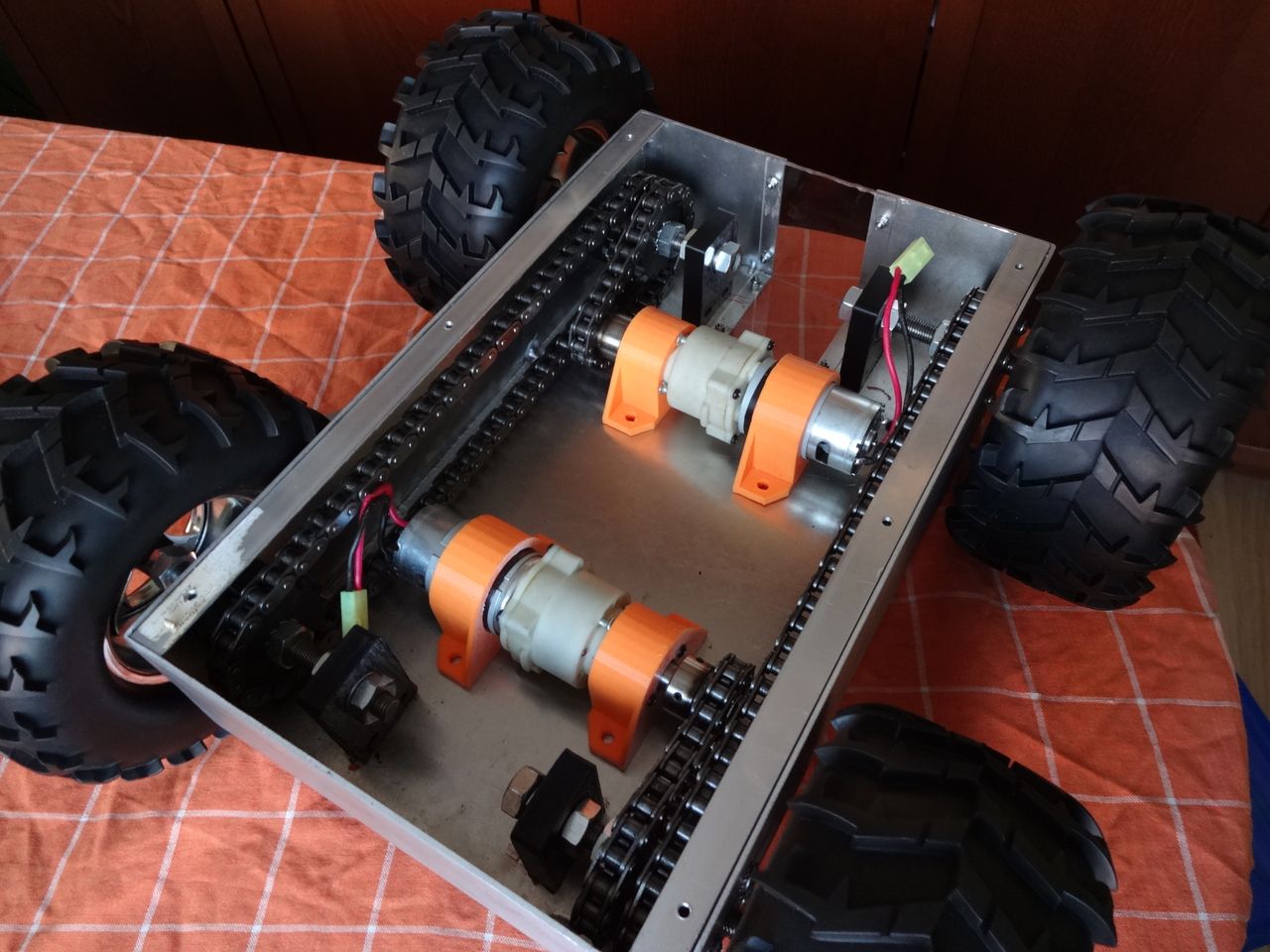


[join][img=przel4][join][img=przel5]
Kamera
Kamera na przodzie robota schowana będzie za szybką z plexi, które zostały wycięte na ploterze laserowym i zamontowane za pomocą śrubek.


[join][img=szybka3][join][img=szybka4]
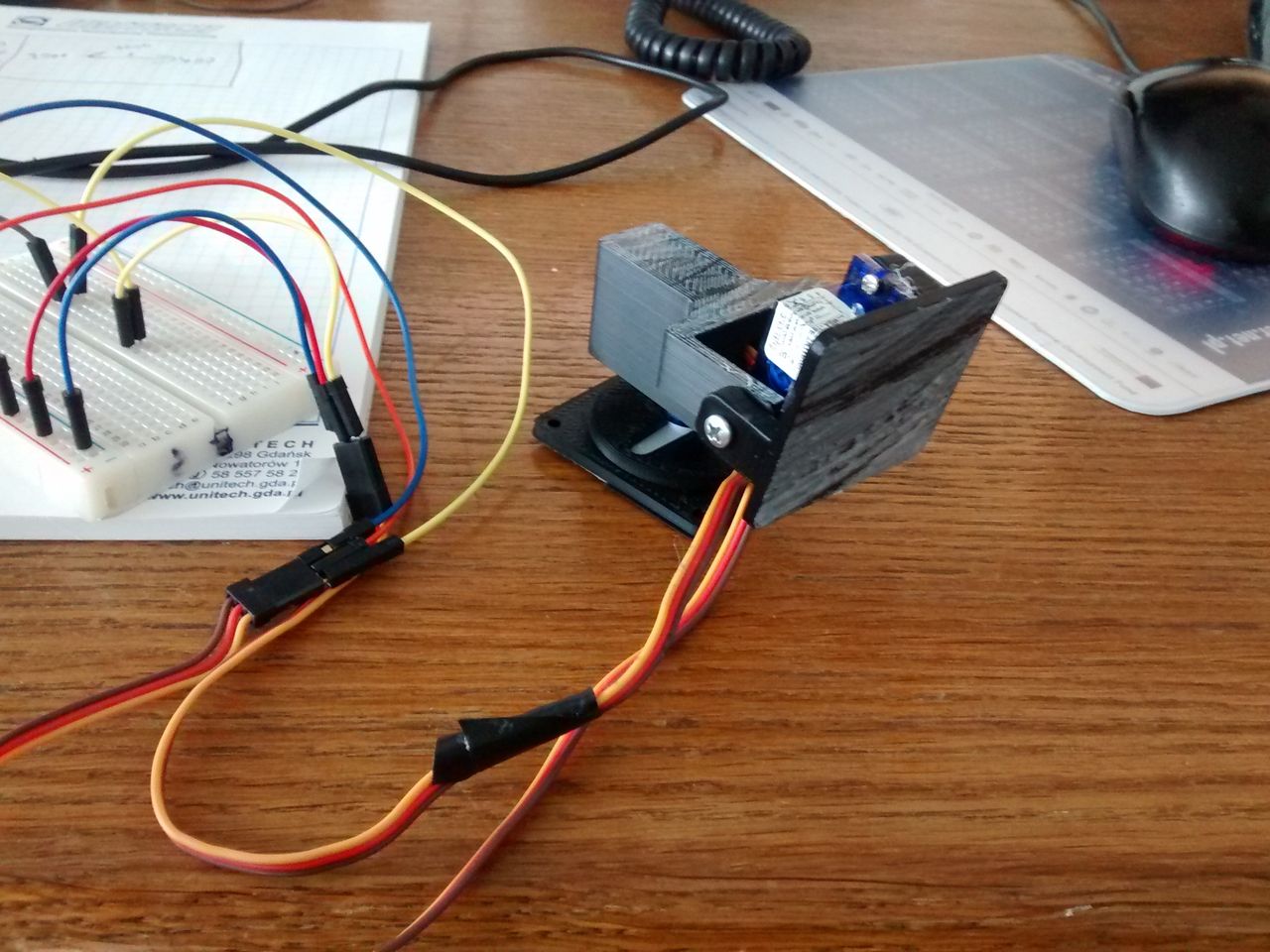
Sam moduł kamery będzie zamontowany na prostym gimbalu, który poruszać będzie się za pomocą mikroserwa s90. Sam mechanizm jest jeszcze do przemyślenia i przeprojektowania tak aby kamerkę można było obracać w osi pionowej o 180 stopni, oraz aby się zmieścił z przodu.
Zasilanie
Samo Raspberry Pi i elektronika zasilane będą z powerbanku o pojemności 3100mAh, które wygrałem na jednym z HotZlotów, zaś silniki za pomocą akumulatora Ni‑MH o pojemności 3500mAh. W pierwszej koncepcji miałem użyć akumulatorów żelowych lecz udało mi się dostać z odzysku dwa ciekawe akumulatory Ni‑MH.


Wielkie podziękowanie dla Michała za projekty 3D, Marka za wycięcie plexi, jak również dla szwagra, który pomógł mi przy składaniu i spawaniu obudowy. No i dla mojej narzeczonej, która była moja prawą ręką ;)
To tyle na dziś. W kolejnej części i już naprawdę ostatniej, pokażę schemat podłączenia elektroniki oraz kod do sterowania robotem no i oczywiście nagrania z testów i jazd próbnych :)





![Zachwycający system mikrofonów bezprzewodowych DJI Mic 2 [Recenzja]](https://v.wpimg.pl/NmMyLmpwYQwsGzpeXwxsGW9DbgQZVWJPOFt2T19Cd1o1Sn1bXwMrDiVXOx0TEyBDPRVjBB0QYVx_Sy4MQUZ9QClNf1xdQ3tdLlR0XkNEYwl5S3UISUd9WXsafkMaBylPMA)




