

Femtosumo, czyli starcie robotów oglądane pod lupą
Z okazji nie najgorszej pogody i wolnego przedpołudnia, w sobotę, 30 listopada, udałam się z aparatem do Strefy Kultury Studenckiej Politechniki Wrocławskiej, aby przyjrzeć się międzynarodowym zawodom Robotic Arena. W 8 kategoriach wystartowało (a przynajmniej zarejestrowało się :‑)) prawie 150 konstrukcji. Ze względu na opóźnienia spowodowane różnego typu problemami (od problemów z siecią w budynku po problemy z przywoływaniem zawodników…) oraz ograniczonego różnymi towarzyskimi obowiązkami okienka czasowego, nie udało mi się niestety doczekać finału żadnej z kategorii… a niektórych nawet startu, czego bardzo żałuję.

Najbardziej interesowały mnie zawody micromouse (robot ma za zadanie samodzielnie znaleźć wyjście z labiryntu) i nanosumo, i żadnego z nich nie udało mi się zobaczyć. Przejazdy micromouse opóźniły się o ponad godzinę, zaś do nanosumo organizatorzy nie mogli znaleźć ringu. Na jednej z największych tego typu imprez w Europie takie rzeczy nie powinny się zdarzać.


Świetną zabawą okazało się śledzenie poczynań robotów w kategorii line follower, w której robot musi automatycznie podążać za linią i pokonać trasę w jak najkrótszym czasie. Robot musi zmieścić się na kartce formatu a4. Jego masa i wysokość nie są ograniczone, podobnie jak liczba silników, które muszą być elektryczne. Nie są ograniczone rodzaje i liczba czujników, ale muszą one działać przy różnych typach oświetlenia.



Na planszy, po której poruszają się roboty, narysowana jest czarna linia o szerokości między 15 a 20 mm, która może się zaginać pod kątem maksymalnie 90°, a łuki mają minimalną średnicę 85 mm. Przejazd uznaje się za prawidłowy, jeśli robot przez cały czas zakrywa linię swoim obrysem i ma kontakt z podłożem przynajmniej w jednym punkcie. No i musi dotrzeć od startu do mety, co nie każdemu się udawało ;‑).

Konstrukcje były naprawdę ciekawe, ale nie wszystkie radziły sobie dobrze na planszy. Dużą rolę odgrywa tu kombinacja szybkości, przyczepności oraz precyzji sensorów. Zdarzało się, że robot wypadał z trasy, zaczynał się kręcić w kółko albo zamiast skręcić — zawracał.


Napatrzyłam się także na pojedynki minisumo. W tej kategorii robot musi zmieścić się na kwadracie 100×100 mm (nie ma ograniczeń wysokości, co często jest wykorzystywane do umieszczania komponentów, które w trakcie walki mogą zostać opuszczone, jak dodatkowe spychacze czy flagi rozpraszające przeciwnika), a jego waga nie może przekroczyć 500 gramów. Robot nie może ponadto niczym rzucać w przeciwnika, wysypywać piasku na ring, pluć ogniem, przyklejać się do ringu itp. Ring (dohyo) ma postać czarnego kręgu z białym obramowaniem. W tej klasie ma średnicę 770 mm.






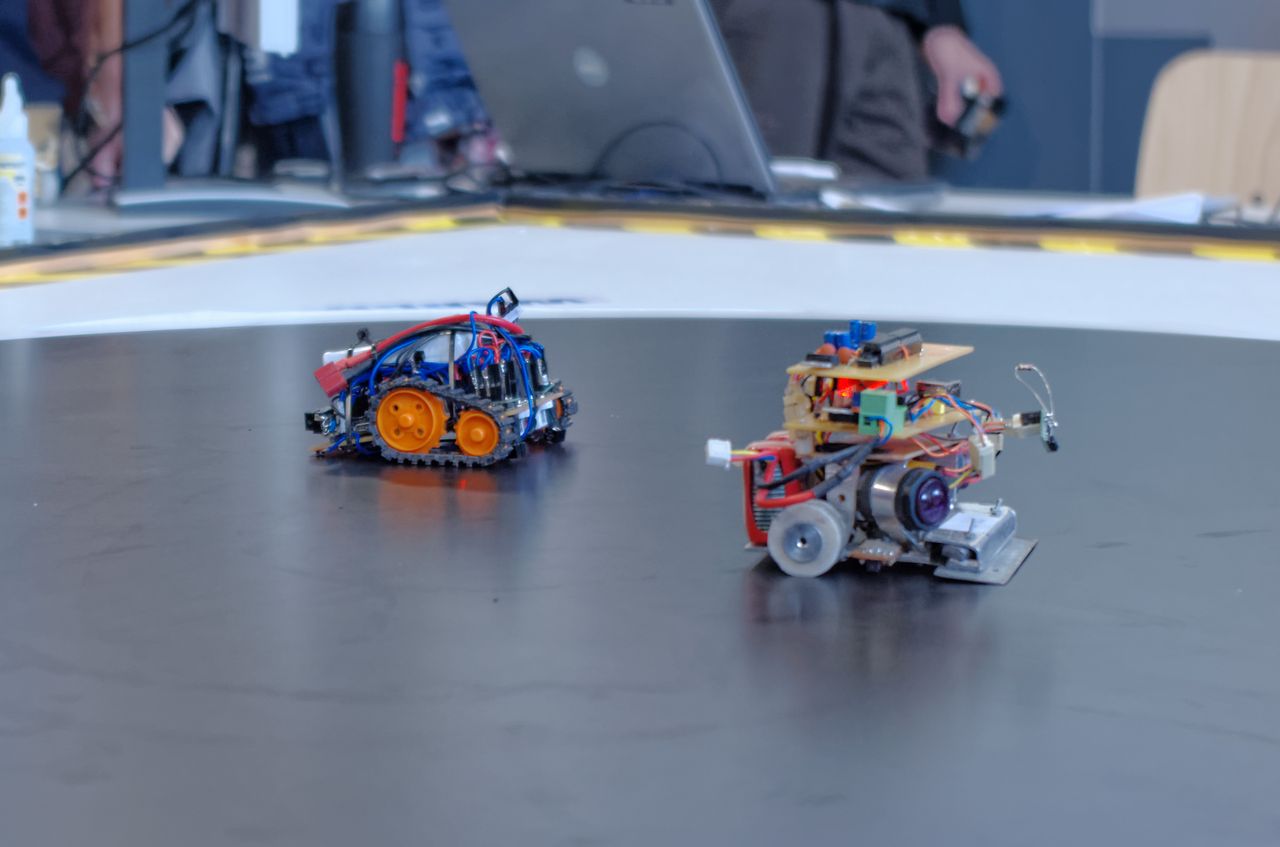


Zawodnicy startują z losowanych przez sędziego pozycji, muszą być zupełnie autonomiczni (w czasie walki konstruktor nie może komunikować się z robotem) i muszą rozpocząć walkę na sygnał pilota sędziego. Zwycięży ten, który wypchnie przeciwnika poza ring. Zdarza się, że błąd programowy lub konstrukcyjny spowoduje, że robot nie jest w stanie wykryć przeciwnika lub sam wyjedzie za wyznaczony obszar.

Kolejne klasy są coraz mniejsze:
- w microsumo na ringu o średnicy 385 mm walczą maszyny mieszczące się na kwadracie 50×50 mm i ważące do 100 gramów,
- w nanosumo ring ma średnicę 192,5 mm, roboty zaś mieszczą się na kwadracie 25×25 mm i ważą do 25 gramów.
Odpowiednio mniejsze jest pikosumo, które nie było rozgrywane podczas tego turnieju. Odbywają się także walki w trybie Enhanced, do których ring ma czterokrotnie większą powierzchnię, a walki są bardziej widowiskowe. Podczas tego turnieju były rozgrywane także deble.

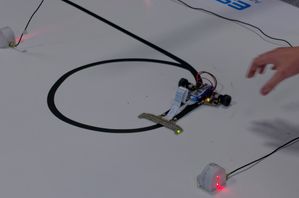
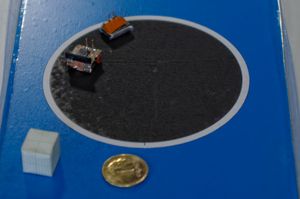
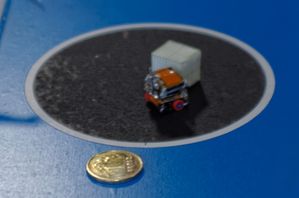
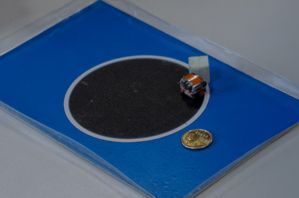
Osoby śledzące rozgrywki sportowe robotów z pewnością wiedzą, że w maju w Polsce skonstruowany został Felek — pierwszy w Polsce robot walczący w klasie femtosumo (1×1 cm, 5 gramów, ring o średnicy 77 mm). Podczas Robotic Arena 2013 miałam okazję zapoznać się z tym przesympatycznym, autonomicznym femtozapaśnikiem, który spokojnie zmieściłby się na monecie 1‑groszowej. Jego autor, Daniel Dudziak z Politechniki Wrocławskiej, chętnie opowiada o jego budowie.

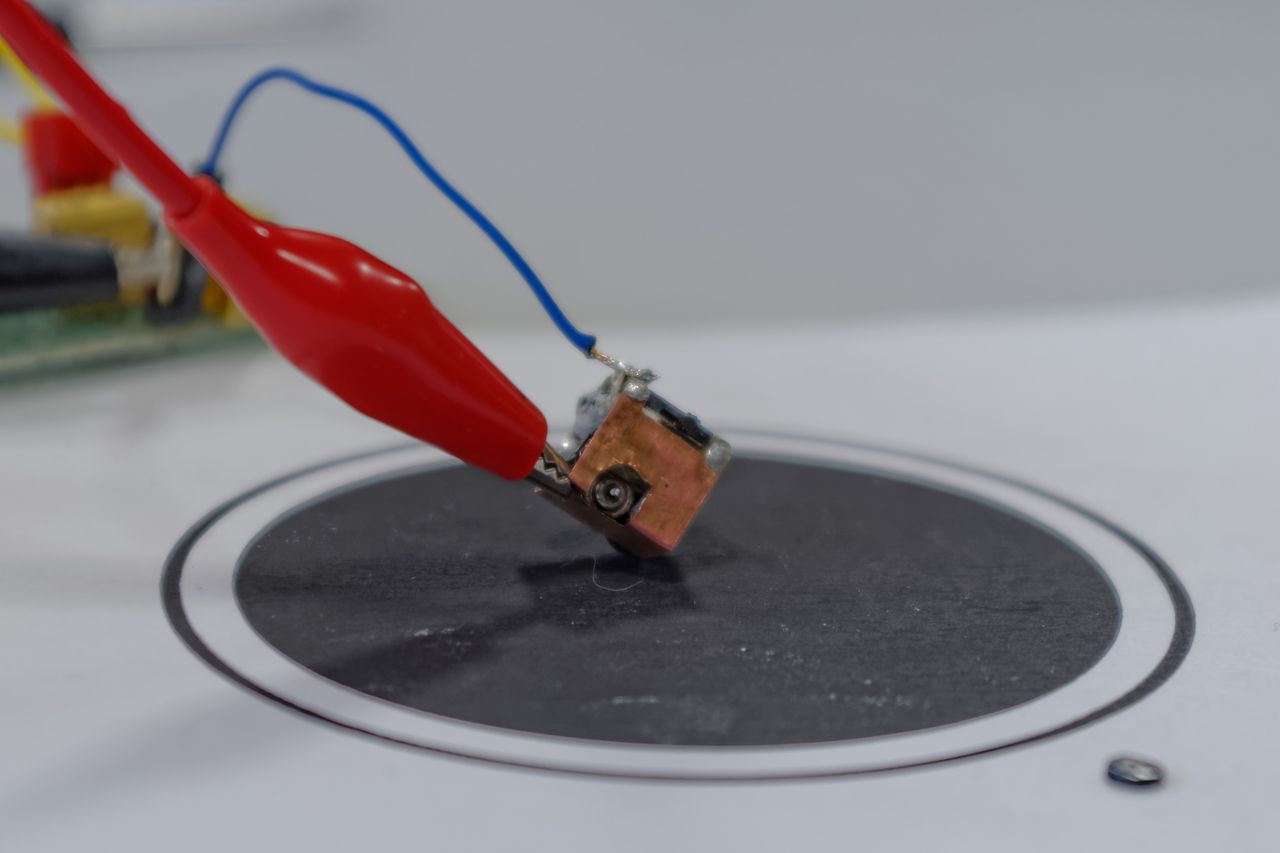
Mózgiem Felka jest 8‑bitowy kontroler ATmega8 firmy Atmel, który steruje także dwoma silnikami. Przeciwnika znajduje za pomocą identycznego dalmierza, jakie znajdziemy w wielu smartfonach, za rozpoznawanie krawędzi ringu odpowiedzialne są dwa czujniki linii. Warto zauważyć, że jego kółka nie są umieszczone symetrycznie.
W maju Feleczek nie miał jeszcze przeciwnika, więc na wszelkich demonstracjach mozolnie przepychał po malutkim ringu papierową kostkę. Jednak podczas tegorocznych zawodów już mógł stanąć w szranki ze Stuartem (od Stuarta Malutkiego), skonstruowanym przez Natalię Nowicką i Karola Kapera z Politechniki Wrocławskiej specjalnie po to, aby Felek miał sparingpartnera. Niestety, kiedy zwiedzałam salę, na której odbywały się zawody, Stuart akurat odpoczywał podłączony do ładowarki, więc nie udało mi się zobaczyć go w akcji.
Zaplanowany pojedynek, który miał być pierwszą oficjalną walką w tej klasie na świecie, został opóźniony.
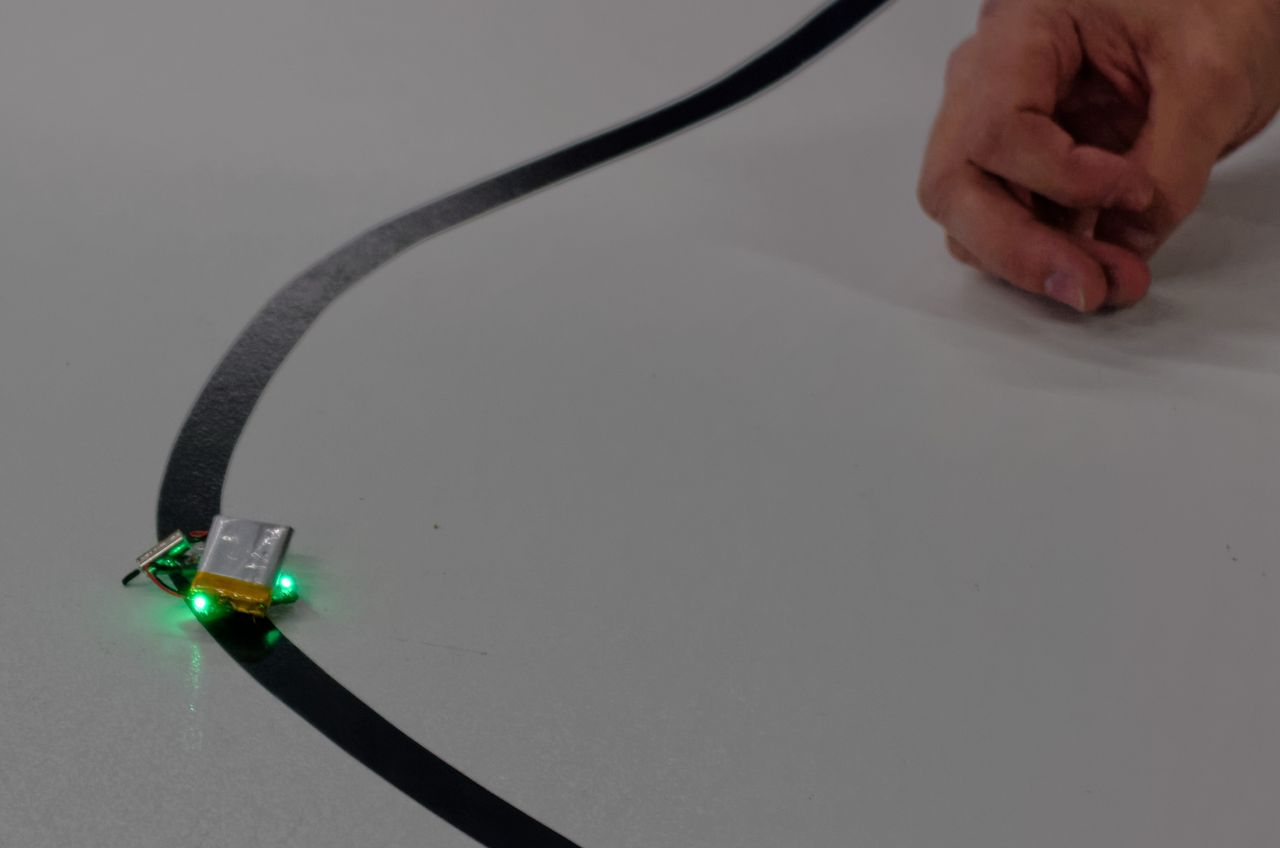
Wygląda na to, że również w klasie Line Follower pojawić się mogą mikrusy. Ten dopiero raczkuje i wciąż wymaga pomocy konstruktora, ale kto wie, jaka przyszłość go czeka ;‑).




![Mroczna Metroidvania dla masochistów. Voidwrought [Pierwszy rzut okiem]](https://v.wpimg.pl/NzU1LmpwYRs0UzpeXwxsDncLbgQZVWJYIBN2T19Cd00tAn1bXwMrGT0fOx0TEyBUJV1jBB0QYUtiA3VeEhJ-VzdXfghdQygbNxwuCxIWY0M0CS1fQxZ6S2IEeUMaBylYKA)
![Myszka gamingowa z wymiennym akumulatorem. Logitech G309 Lightspeed [Recenzja]](https://v.wpimg.pl/ZmRkLmpwdQwzCTpeXwx4GXBRbgQZVXZPJ0l2T19CY1oqWH1bXwM_DjpFOx0TEzRDIgdjBB0QdVxiWi4MFBZuQGoPflhdQ2oMMUYuDkJBd1plXH4PRUVrXTQPKEMaBz1PLw)
![Szybsza, cichsza, wygodniejsza. Trackball Logitech MX Ergo S [Recenzja]](https://v.wpimg.pl/NWI0LmpwYTYoUjpeXwxsI2sKbgQZVWJ1PBJ2T19Cd2AxA31bXwMrNCEeOx0TEyB5OVxjBB0QYTR8VH5bRBV4enwHKlhdQyszKB11WhNBYzZwA35eE09_MnxSeEMaByl1NA)
![Wygodne słuchawki premium za mniej niż 300 zł. Soundcore Space One [Recenzja]](https://v.wpimg.pl/Nzk4LmpwYRsKVjpeXwxsDkkObgQZVWJYHhZ2T19Cd00TB31bXwMrGQMaOx0TEyBUG1hjBB0QYRsNBikLQ0d3V1wEKFxdQ35OWhl1CBUSY0wJV3VcRRV_SFwNdEMaBylYFg)