

SPiBot - projektowanie i prototypowanie nadwozia z pomocą drukarki 3D
Minęło sporo czasu odkąd przedstawiłem swojego robota SPibot. Ze względu na brak czasu nie miałem kiedy zająć się jego dalszym rozwojem. Na szczęście inne projekty i prace się już skończyły albo mają się ku końcowi, więc czasu trochę przybywa, aby zająć się dalszym rozwojem robota.

Nadwozie
Od samego początku zastanawiałem się nad samym nadwoziem dla robota. Czy ma być to nadwozie zamknięte i schludne czy po prosu ma być to typowy prototyp ze zwykłą sklejką i elektroniką na zewnątrz.

Mam znajomego (Michała), który posiada drukarkę 3D i któremu opowiedziałem o moim pomyśle na nadwozie. Kolega zgodził się pomóc mi zaprojektować i wydrukować takowe nadwozie.
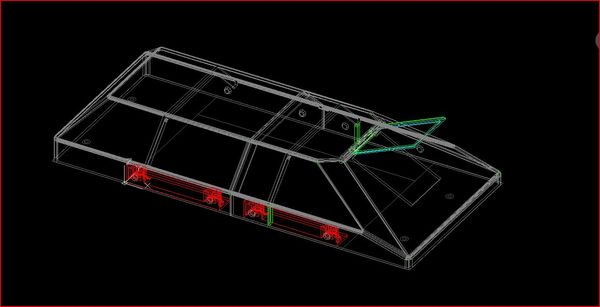
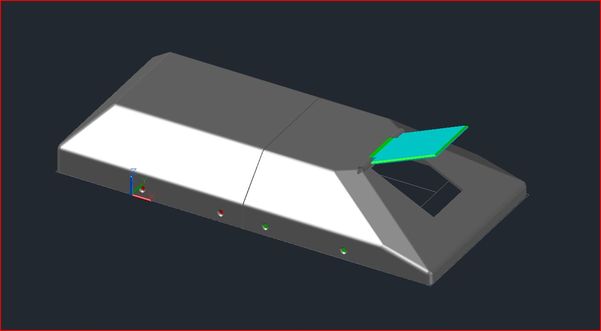
Moja koncepcja zakładała, że obudowa posiadać będzie klapkę z której wysuwać będzie się kamera, która byłaby w stanie robić zdjęcia, nagrywać lub strumieniować obraz. Koncepcji mechanizmu wysuwania oraz rodzaju klapy było dużo, ale udało nam się wybrać jedno rozwiązanie.
Sama klapka będzie tylko zaczepiona na prostym drucie. Mechanizm będzie wypychać klapkę.

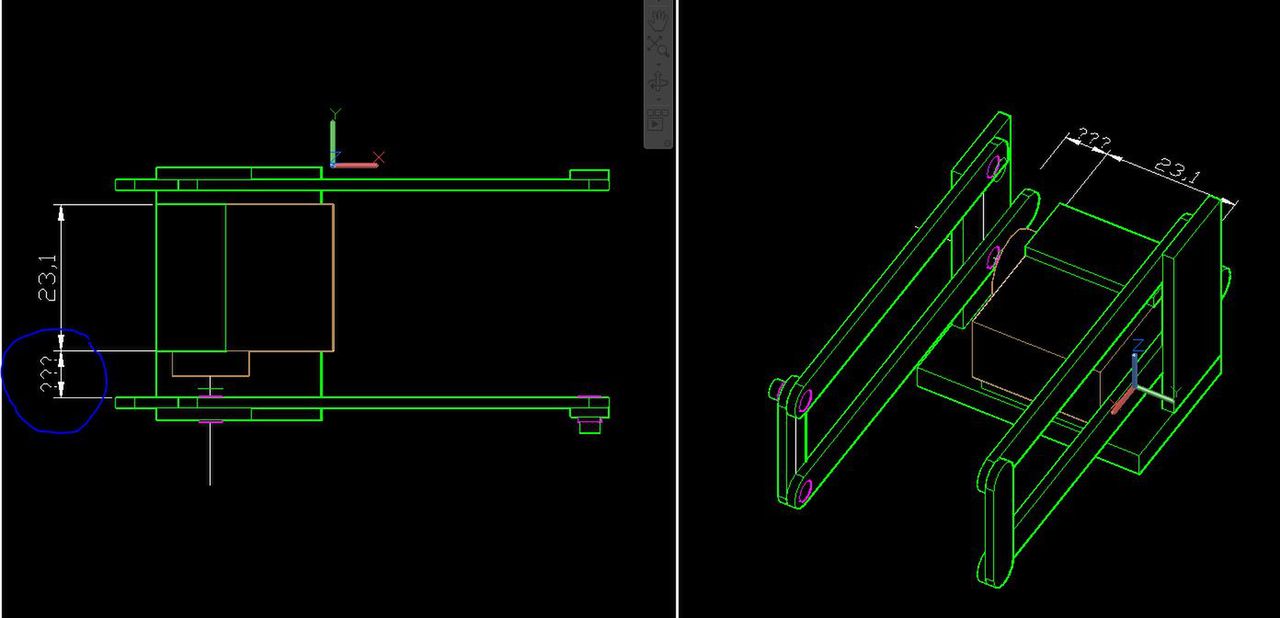
Wysięgnik na kamerkę został lekko zmieniony względem wstępnego projektu i zostało mu tylko jedno ramię.

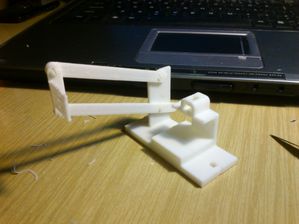
Prototyp nadwozia

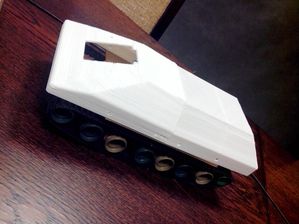
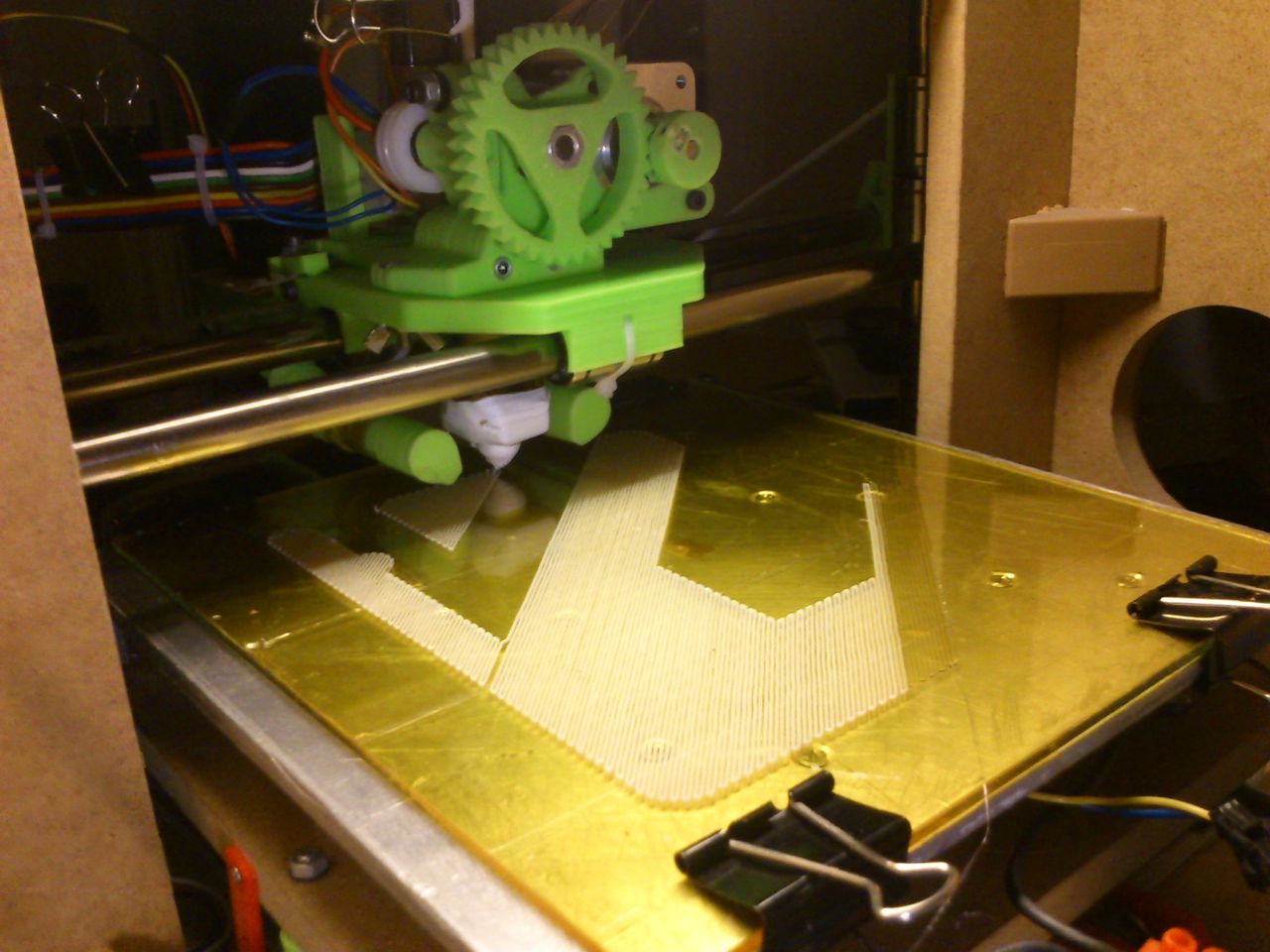
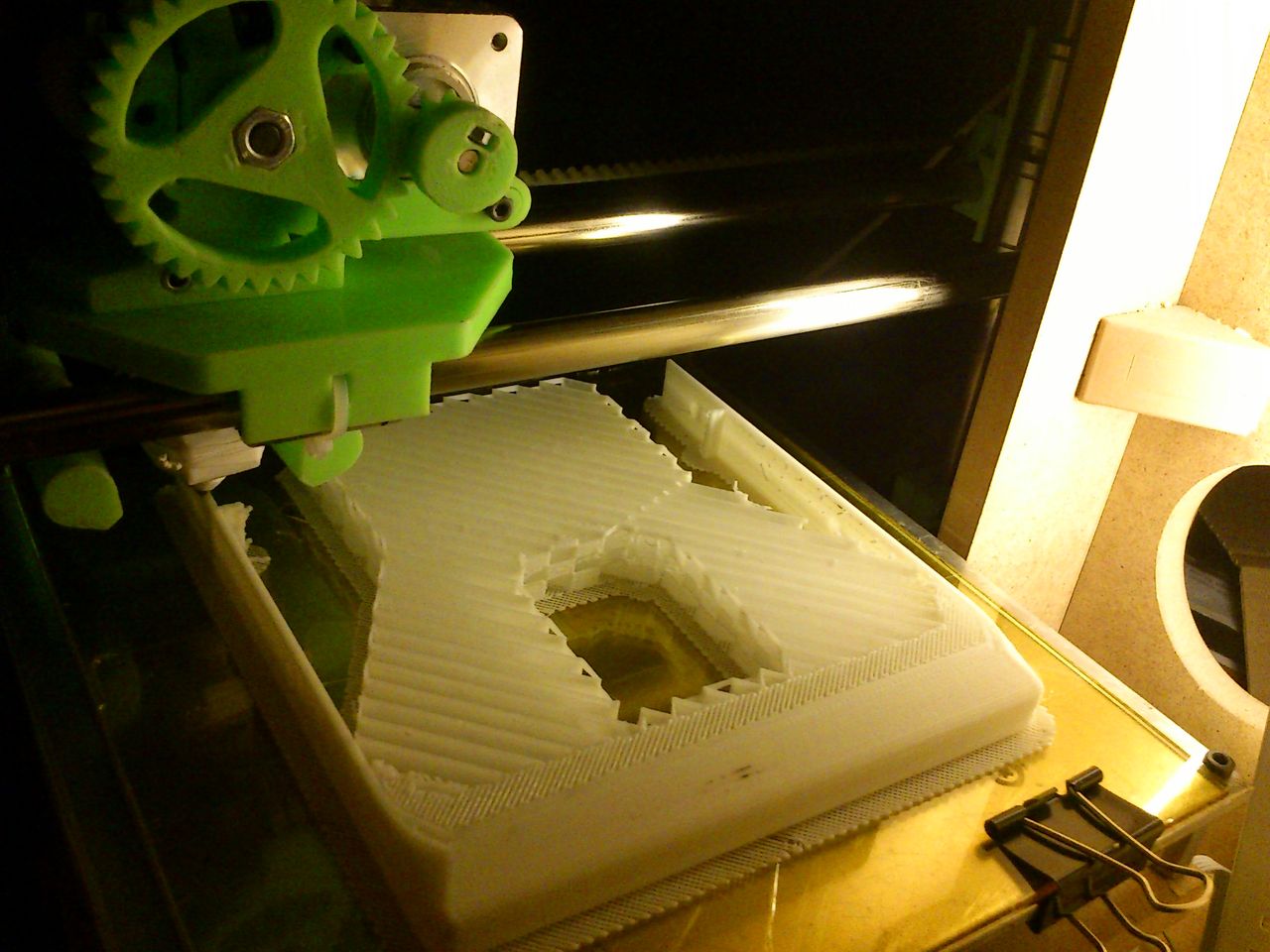
Pierwsze drukowanie na szybko nadwozia do przymiarek wypadło obiecująco. Praktycznie zero poprawek. Wymierzone prawie idealnie. Pozostało teraz wydrukować nadwozie w lepszej jakości.
[join][img=druk4][join][img=druk5]
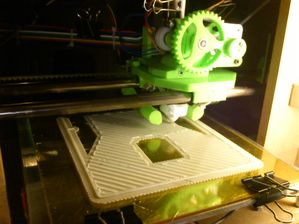
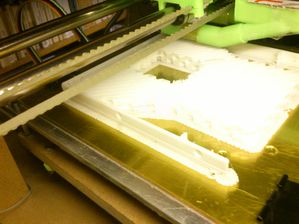
Po wydrukowaniu pozostało wyciąć podpórki niezbędne w procesie druku, aby wydruk się nie zdeformował lub wykrzywił podczas druku.
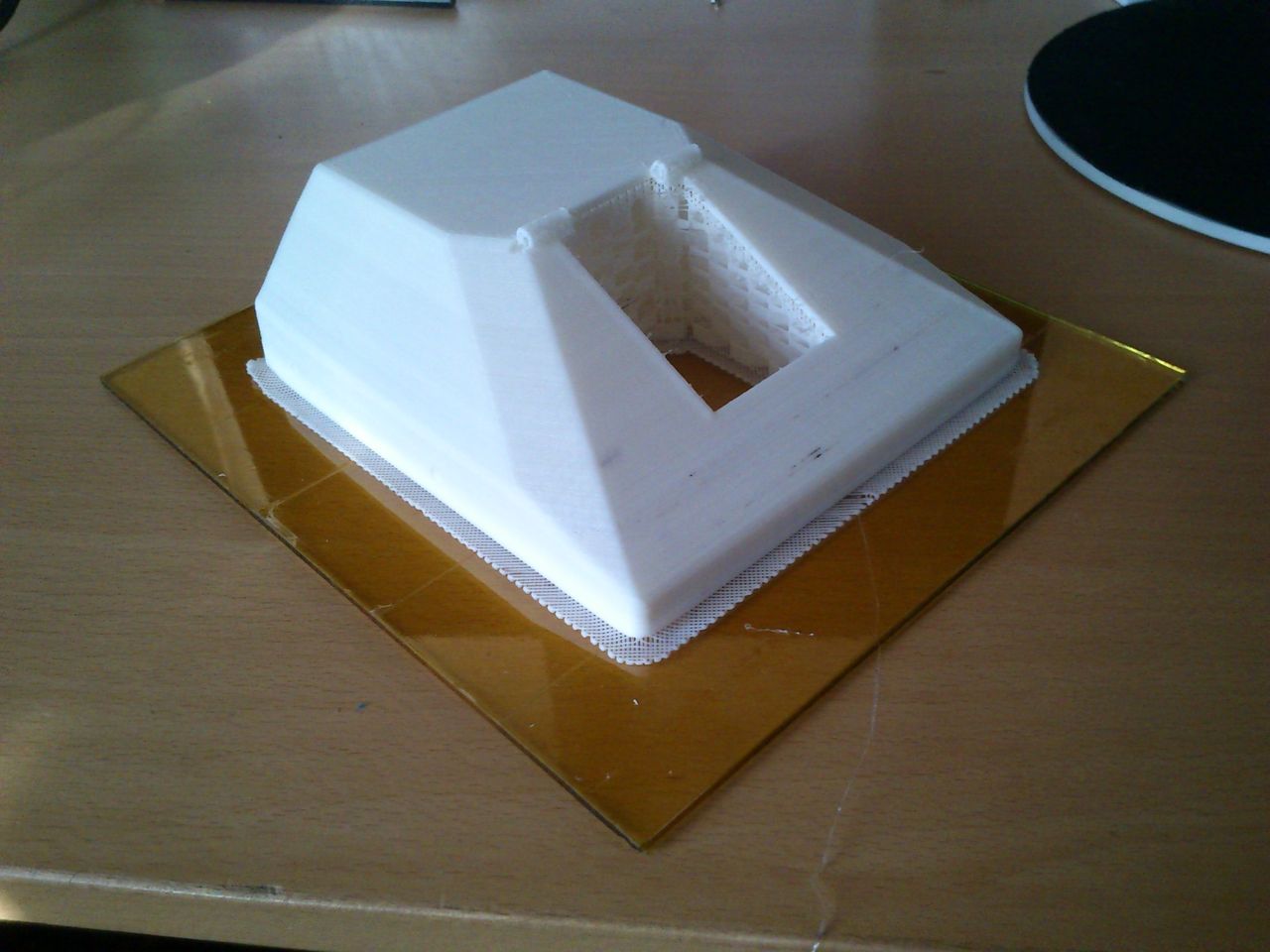

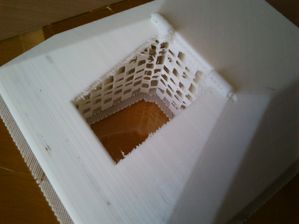
[join][img=druk10][join][img=druk11]

Po wycięciu podpórek pora na ich wygładzenie i malowanie.


Sterowanie
Obecne sterowanie było robione szybko i nie jest jakimś super precyzyjnym rozwiązaniem. Polega ono na wysyłaniu parametrów przez prostą stronę i na podstawie tych parametrów ustawianiu pinów do jazdy.

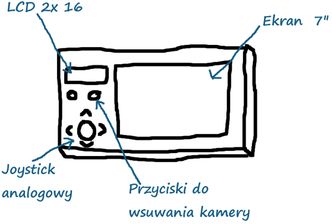
Pracuję nad płynnym sterowaniem wykorzystując do tego części z tabletu oraz układ atmega8 z joystick-iem analogowym, który ma być podłączony do tabletu za pomocą USB. Dodatkowo planuję dwa przyciski do wysuwania i chowania kamery oraz opcjonalnie dodatkowo lcd 2x16 lub 2x8 do wyświetlania dodatkowych informacji.

W planach mam przygotowanie projektu obudowy i jego wydruk. Dodatkowo zaprogramować muszę układ atmega oraz połączyć go z tabletem, aby móc odbierać polecenia i przekazywać je do robota za pomocą WiFi. Również myślę już nad dodatkowym modułem 433Hz (z mocnym nadajnikiem np. Telecontrolli) do komunikacji i sterowania.
Czujniki i inne
W pierwotnych planach miałem zamontować m.in. zegar RTC, akcelerometr, GPS oraz czujnik odległości. Jednak doszedłem do wniosku, że ograniczę się w wypadku tej konstrukcji tylko do zegara RTC oraz czujnika odległości, który będzie zamontowany zaraz pod kamerą.
Streaming obrazu
Do przesyłania i nagrywania obrazu zamierzam wykorzystać moduł kamery dedykowanej dla Raspberry Pi. Obecnie testuję dostępne oprogramowanie do stream-owania i muszę wybrać takie, które ma najmniejsze opóźnienia, czyli nie buforuje obrazu do pliku tylko bezpośrednio wysyła obraz. Po pierwszych testach mogę stwierdzić, że dzięki używaniu Player-ów flash-owych na stronie udało mi się zmniejszyć opóźnienia poniżej 1 s. Gdy już wszystko przetestuję przedstawię moje rozwiązanie.
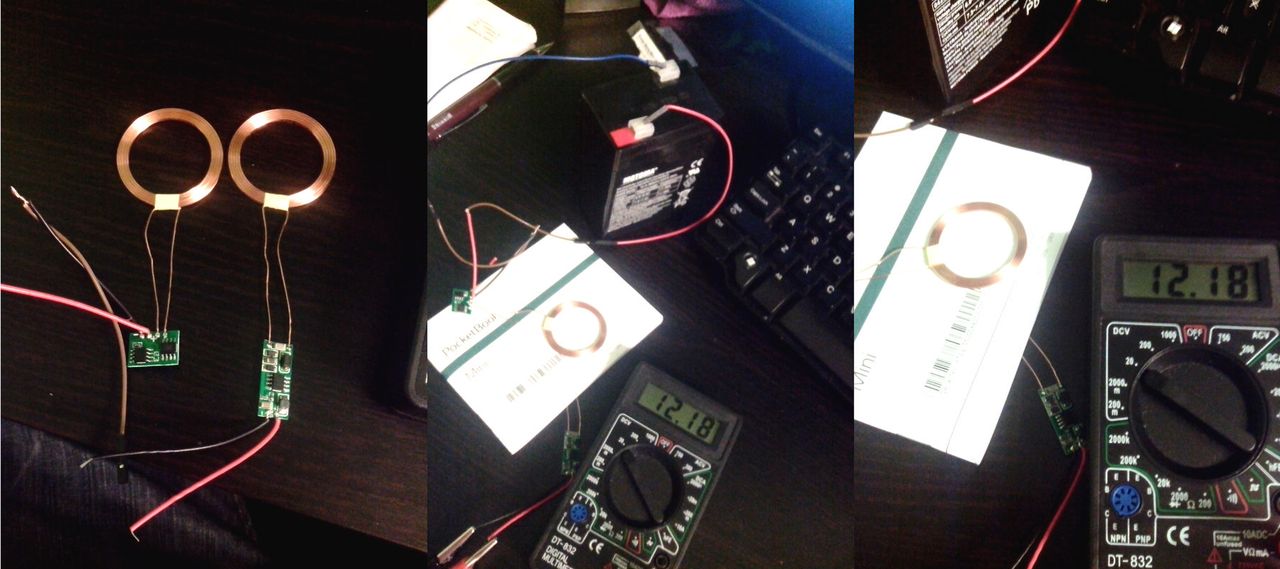
Bezprzewodowe ładowanie
W planach mam również bezprzewodowe ładowanie. Moduł bezprzewodowy jest na 12V a moje baterie w robocie na 9,6V dlatego zastosuję redukcję napięcia, np. rezystor lub zwykły stabilizator.
Koncepcja jest taka, aby robot w późniejszym czasie potrafił podjechać sam pod stację ładującą w razie gdyby kończyłyby mu się baterie. Jest to jedno z najtrudniejszych zadań, aby robot sam nawigował w zamkniętych pomieszczeniach. Dlatego najpierw sam będę podjeżdżać do stacji ładującej ;)
Ukryty cel
SPiBot jest można tak powiedzieć pomostem do kolejnej konstrukcji czyli do SPibot 2 (wstępna nazwa), który zamierzam zbudować już z aluminium. Sama konstrukcja będzie większa i zamierzam do niej zamontować już akcelerometr, GPS oraz dodać alternatywny sposób komunikacji (433Hz) oraz dodatkowo transmisję wideo za pomocą Transmitera 1,2GHz, dzięki temu będę w stanie osiągnąć duży zasięg dla robota. W dalszym ciągu zastanawiam się nad gąsienicami czy kupić gotowe pasy zębate dwustronne (kosztowne!) czy poszukać jakichś pasów do samochodów do rozrządu lub po prostu zbudować gąsienicę z łańcuchów i stopek gumowych. A może jednak 6 kołowca zrobić?

Projekt zamierzam zacząć już w wakacje, zaś elementy elektroniki już zamawiam i kompletuję. Na pewno podzielę się przemyśleniami i postępem projektu z wami :) Zaś samego SPiBot-a zamierzam zabrać na Hotzlot* ;)
stay tuned
W następnym wpisie pokażę i opiszę działające nadwozie wraz z wysuwaną kamerką oraz być może już panel sterowania.
Podziękowania
Przy okazji chciałbym podziękować Michałowi za kawał dobrej roboty tj. za projekt, wydruk i wsparcie przy budowie nadwozia, bez którego nie udało by się zrobić tego wpisu ;)
Wcześniejszy wpis:
* o ile dostanę zaproszenie :D
![Kosztowna i mało wydajna drukarka mobilna do zdjęć. Canon Zoemini 2 [Recenzja]](https://v.wpimg.pl/OGYzLkpQYCY4GDpYXyptM3tAbgIZc2NlLFh2SV9kdnAhSX1dXyUqJDFUOxsTNSFpKRZjAh02YHFpSnsJEjAsajsYKQhdZS5wOlcuDhNmYiNhTi9ZSTN9I2Ecf0U6AQhlJA)
![Kompaktowy Soundbar 2.0.2 z 3D Dolby Atmos. Sharp HT-SB700 [Recenzja]](https://v.wpimg.pl/NzVlLmpwYRs3DjpeXwxsDnRWbgQZVWJYI052T19Cd00uX31bXwMrGT5COx0TEyBUJgBjBB0QYU9nWX8MQxMrVzQNeA5dQyxKYUF1X0lHYxgzCS0PExF-T2FZKUMaBylYKw)

![Topowa wydajność w bezprzewodowej myszce. Genesis Zircon XIII [Recenzja]](https://v.wpimg.pl/YzMyLmpwdhssGzpeXwx7Dm9DbgQZVXVYOFt2T19CYE01Sn1bXwM8GSVXOx0TEzdUPRVjBB0Qdkt9TilYEURoV3wYKV5dQz0edVQtXEVEdE4oT35fFRU8Hi5KfkMaBz5YMA)
![Niskoprofilowa klawiatura mechaniczna dla graczy. Logitech G515 TKL [Recenzja]](https://v.wpimg.pl/OGI5LmpwYCYoVzpeXwxtM2sPbgQZVWNlPBd2T19CdnAxBn1bXwMqJCEbOx0TEyFpOVljBB0QYHYtBnpdFhN5anFXLgxdQ3xyfhgtWRREYn9xBn8JQBUpJXFXdUMaByhlNA)


