

Język drabinkowy
Języki programowania były tematem już niejednego wpisu na blogu dobrychprogramów. Nikt wcześniej jednak nie był zainteresowany bardzo ciekawym językiem, wykorzystywanym szczególnie przy konieczności obsługi logiki. Pomimo tego, że nie znajdziemy w nim standardowych instrukcji pisanych jako słowa kluczowa, a do programowania nie musimy wykorzystywać nawet klawiatury (chodź to zależy również od wykorzystywanego IDE) język ten jest powszechnie stosowany. Większość z Was może mieć z nim kontakt nawet codziennie (chodź początkowy opis brzmiał jakby miał to być kolejny BrainFuck albo inny WhiteSpace). Takim właśnie językiem programowania jest język drabinkowy.
O co chodzi z tą drabinką?
Skąd nazwa język drabinkowy? Otóż kod programu napisany w tym właśnie języku przypomina drabinkę, a poszczególne instrukcje wykonywane są „szczebel po szczeblu” (od góry do dołu) od strony lewej do prawej. Przykładowy kod programu przedstawiony jest na poniższym obrazku.

Na screenie widzimy styk i cewkę. Jeśli styk jest otwarty to sygnał nie dochodzi do cewki. Jeśli styk jest zwarty (wartość 1) to sygnał dochodzi do cewki i w komórce pamięci %Q1 również jest sygnał 1. Skąd te dziwne nazwy? O co chodzi ze stykiem i cewką? Są to instrukcje w języku drabinkowym, umożliwiające budowanie bardziej rozbudowanych działań. Np. Styk zwykły to AND, styk normalnie zwarty to NAND. Jeśli chcielibyśmy zrobić np. aby w komórce pamięci %Q1 zwrócona była wartość 1 jeśli spełnionych zostanie więcej warunków możemy to uczynić np. w sposób przedstawiony poniżej
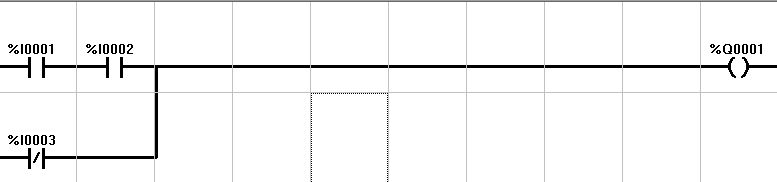
W powyższym programie sygnał płynąc od lewej do prawej najpierw natknie się na styk ze zmienną %I1. Jeśli w tej komórce będzie wartość 1 to przejdzie dalej do styku ze zmienną %I2. Jeśli nie to do styku %I2 sygnał nie dojdzie. Itd. Tu realizowana jest funkcja AND. W naszym programie występuje również styk ze zmienną %I3. Jest to styk normalnie zamknięty tzn. w momencie gdy w komórce %I3 jest 0 to jest on zwarty (sygnał przejdzie), natomiast gdy w %I3 jest 1 to styk się otwiera. Sygnał nie przejdzie. Wraz ze stykami %I1 i %I2 styk %I3 realizuje funkcje logiczną OR. Jeśli %I1 i %I2 są 1 lub %I3 jest 0 to cewka otrzyma sygnał. Banalnie proste, prawda?
O co chodzi z tymi zmiennymi?
W sterownikach programowalnych z myślą o których powstał ten język zmienne podzielone są na dwa rodzaje: dyskretne i rejestrowe. Zmienne dyskretne reprezentowane są przez adresy pamięci: %I – fizyczne wejścia dyskretne %Q – fizyczne wyjścia dyskretne %M – pomocnicze zmienne programu sterującego %T – tymczasowe zmienne pomocnicze (tracą swój stan po zaniku zasilania) %S – zmienne systemowe informacyjne (nie można ich zmienić) %G – zmienne globalne Oprócz nich są również zmienne rejestrowe: %R – zmienna 16‑bitowa (maksymalnie). %AI – rejestr wejść analogowych %AQ – rejestr wyjść analogowych Niektóre IDE pozwalają nadawać zmiennym nazwy symboliczne. Wtedy w programie zamiast adresu komórki pamięci w której znajduje się odpowiednia wartość możemy używać nazw symbolicznych.
Coś bardziej skomplikowanego
Oprócz operacji na zmiennych dyskretnych nasze programy mogą również wykonywać funkcje na liczbach. Przykładowy program, już nieco bardziej skomplikowany przedstawiony jest poniżej.
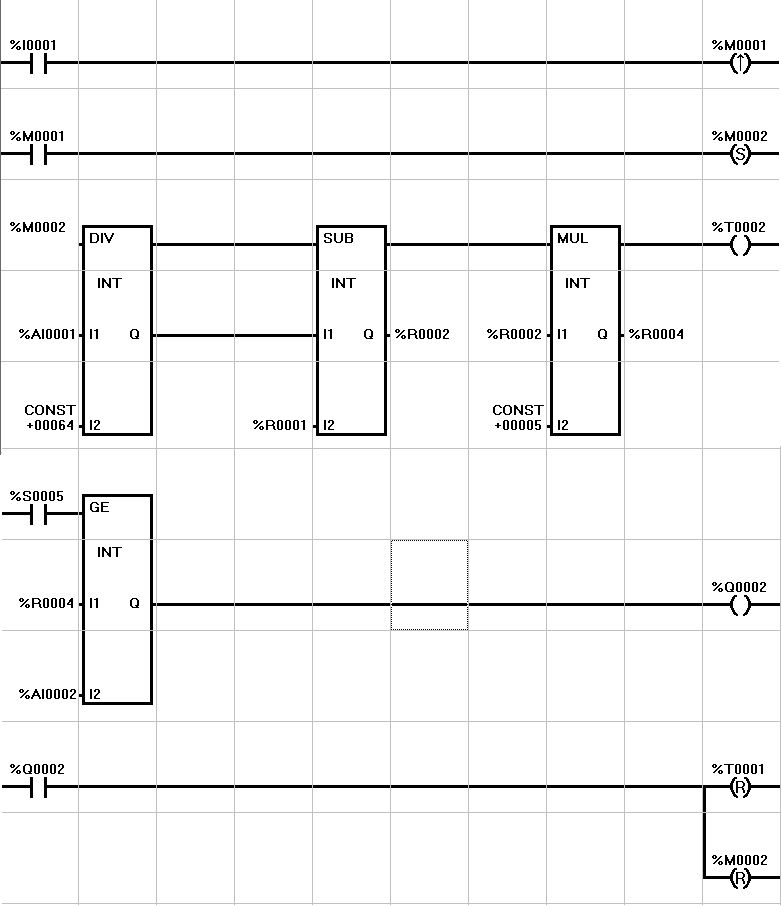
Działanie powyższego programu jest nastepujące. 1. W szczeblu pierwszym do zmiennej %M1 zostaje zapisana wartość 1 tylko w momencie zmienny %I1. Gdy w jednym cyklu zmienna %I1 nie zmienia się z 0 na 1 wartość %M1 przyjmuje wartość 0. 2. Następna linia to zapamiętanie w zmiennej %M2 zmiany stanu w zmiennej %M1. 3. Kolejny szczebel zostaje wykonany tylko gdy wartość %M2 ma wartość 1. Zostaje wtedy odczytana wartość ze zmiennej %AI1 i podzielona przez 64. Wynikowa wartość z tego działania zostaje przekazana w sposób bezpośredni do kolejnego działania – odejmowania. Zostanie ono wykonane tylko po prawidłowym ukończeniu dzielenia. Wynikiem tego działania będzie różnica dzielenia i wartości zapisanej w rejestrze %R1. Zmienna %R1 zajmuje jeden rejestr – jest więc 8 bitowa. Wynik zwrócony przez odejmowanie zostaje zapisany do rejestru %R2 i przekazany w sposób pośredni do mnożenia. Tu zostaje on pomnożony przez wartość stałą 5. Prawidłowe wykonanie mnożenia – a więc wszystkich trzech działań występujących w tej linijce gwarantuje zapisanie do zmiennej %T2 wartości 1. 4. Kolejny szczebel to porównanie wyniku mnożenia z odczytaną zmienną %AI2. Jeśli wartość zapisana w %R4 jest większa lub równa od tej odczytanej to w zmiennej %Q2 zostaje zapisana wartość 1. Porównanie to zostaje wykonane tylko wtedy gdy wartość %S5 ma wartość 1. Zmienna %S5 jest zmienną systemową, przez pół sekundy przyjmuje wartość 0 przez kolejne pół sekundy wartość 1. 5. Jeżeli %Q2 jest „1” to zresetuj (ustaw na 0) komórki pamięci %T1 i %M2.
Zakończenie
Jak widać język drabinkowy polega na odpowiednim łączeniu bloków. Dzięki ich odpowiedniemu ułożeniu nasz program może wykonywać skomplikowane operacje i umożliwić sterowanie naprawdę złożonymi procesami. Dzięki zastosowaniu języka drabinkowego programować mogą osoby nie znające się na komputerach. Sam język drabinkowy oparty o styczniki i cewki jest ukłonem w stronę elektryków i elektroautomatyków, którzy zajmują się obwodami, a nie typowym programowaniem. Na początku wpisu napisałem, że większość z czytelników korzysta z programów napisanych w języku drabinkowym na co dzień. Sterowniki programowalne zaprogramowane w tym języku stosowane być mogą np. do sterowania światłami na skrzyżowaniu, windą w budynku, sterowanie poziomem cieczy w zbiorniku (możliwość zaimplementowanie w kodzie również regulatora PID). Jeśli jednak jesteście zainteresowani jego nauką to polecam program Symulator. Jest on udostępniony pod linkiem: http://www.ely.pg.gda.pl/kiss/attachments/276_Symulator!.zip Program umożliwia oprócz napisania programu również jego przetestowanie, a także umożliwia wymianę danych z innymi aplikacji dzięki komunikacji przez protokół DDE. Sama nauka tego języka pozwala w prosty sposób zrozumieć zmianę stanów logicznych i operacje logiczne. Łatwa konstrukcja języka sprawia, że jego nauka zajmuje naprawdę tylko chwilę!



![Miniaturowy lokalizator GPS na każdą kieszeń. notiOne GPS miniPRO [Recenzja]](https://v.wpimg.pl/YjM5LmpwdgssVzpeXwx7Hm8PbgQZVXVIOBd2T19CYF01Bn1bXwM8CSUbOx0TEzdEPVljBB0Qdgt8VHhYFhE9Ry9TL15dQ2FYKxh1XEJFdFt0AChaR049WS8GdUMaBz5IMA)
![Mobilny czytnik, który mógłby zostać smartfonem. Onyx Boox Palma [Recenzja]](https://v.wpimg.pl/MDliLmpwYiUNCzpeXwxvME5TbgQZVWFmGUt2T19CdHMUWn1bXwMoJwRHOx0TEyNqHAVjBB0QYnUKXXwOSUQvaVQLLlldQygmD0QtWkEWYHdYXXVZQEF_J1xQLkMaBypmEQ)
![Kompaktowy projektor ze wbudowanym Google TV. ViewSonic LX60HD [Recenzja]](https://v.wpimg.pl/Y2M0LmpwdlMsUjpeXwx7Rm8KbgQZVXUQOBJ2T19CYAU1A31bXwM8USUeOx0TEzccPVxjBB0QdlN6A3hVQEZvHyxUfVpdQ2pWeh11CRUUdAJ7Ai0OQEI7BS5TeEMaBz4QMA)


